





- Shape Memory Alloy-based Wearable Fabric Actuators: Form and Integration
Wonhee Ji*, Jaewoo Roh*, Hangyeol Baek*, Hyungbin Byun**, Hyunsoo Kim*, Jinwoo Jeong*, Il-Kwon Oh*†
* Mechanical Engineering Department, Korea Advanced Institute of Science and Technology
** Robotics Program, Korea Advanced Institute of Science and Technology- 형상기억합금 착용형 패브릭 액츄에이터 연구 동향: 구조 및 통합
지원희* · 노재우* · 백한결* · 변형빈** · 김현수* · 정진우* · 오일권*†
This article is an open access article distributed under the terms of the Creative Commons Attribution Non-Commercial License (http://creativecommons.org/licenses/by-nc/4.0) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
Shape Memory Alloys (SMAs) have garnered significant attention as smart materials for wearable haptic interfaces due to their high specific power density, silent operation, deformability by pre-design, and ability to generate biomimetic motion. A comprehensive view of wearable SMA-based fabric actuators, focusing on their structural forms and actuation behaviors is provided. SMA actuators, categorized into linear, spring, fabric, and composite multi-layer, are comparatively analyzed in their distinct deformation mechanisms and performance characteristics. Furthermore, various types of haptic feedback and the integration of SMA actuators into wearable systems are examined. Key application areas such as robotic teleoperation and extended reality (XR) are discussed, along with current technical challenges and future directions of the SMA fabric actuators.
형상기억합금(Shape Memory Alloy, SMA)은 높은 단위 출력밀도, 무소음 구동, 변형거동 설계, 생체 유사 운동 구현 등의 특성으로 착용형 햅틱 인터페이스에 적합한 스마트 소재로 주목받고 있다. 본 논문은 착용형 SMA 기반 패브릭 액츄에이터의 구조적 형태와 거동 특성을 중심으로 기술 동향을 종합적으로 고찰한다. SMA 액츄에이터 구조를 선형, 스프링형, 옷감형, 복합 다층형 등으로 분류한 후 각기 다른 변형 방식과 성능 특성을 비교하고, 다양한 햅틱 피드백 형태 및 웨어러블 시스템과의 통합 가능성을 분석한다. 아울러 로봇 원격제어, 증강현실 등 주요 응용 분야와 기술적 과제를 함께 다루며 SMA 패브릭 액츄에이터의 향후 발전 방향을 제시한다.
Keywords: 형상기억합금(Shape Memory Alloy), 착용형(Wearable), 패브릭 액츄에이터(Fabric Actuator), 햅틱(Haptics)
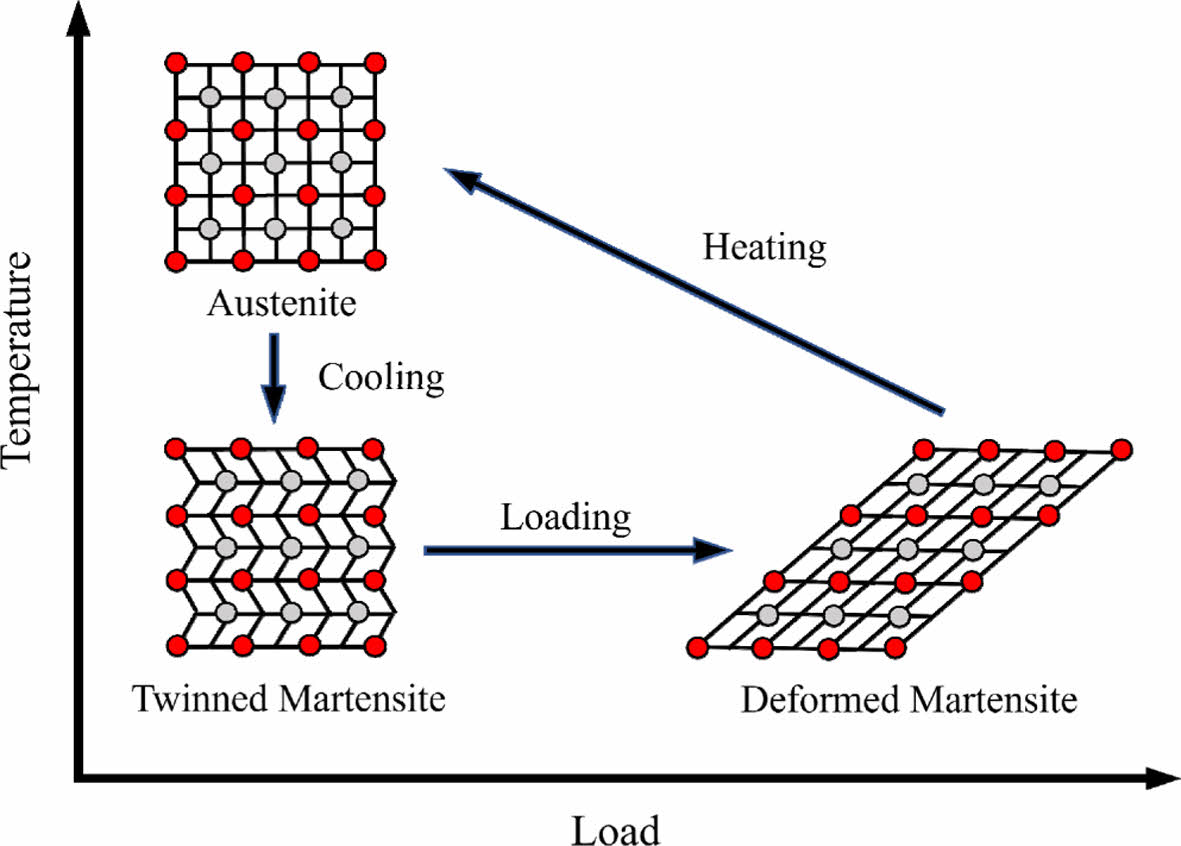
SMA는 외부 자극, 특히 온도 변화에 반응하여 결정 구조가 가역적으로 전이되며 스스로 형태를 복원할 수 있는 기능성 금속 소재이다. SMA는 변형된 상태에서 특정 온도 이상으로 가열될 경우 초기 형상을 회복하는 고유한 특성을 가지며, 이러한 동작 원리는 Fig. 1과 같이, 열역학적으로 안정한 두 상(phase) 간의 상변이(phase transformation)를 기반으로 한다. 일반적으로 SMA는 고온에서 안정한 오스테나이트(Austenite) 상과 저온에서 형성되는 마르텐사이트(Martensite) 상 사이를 왕복하는 전이 과정을 통해 작동하며, 마르텐사이트 상은 초기에는 쌍정 구조(twinned structure)를 가지다가 외부 응력에 의해 detwinning 과정을 거쳐 변형된다[1].
형상기억합금의 대표적인 작동 특성은 크게 두 가지로 구분된다. 첫째, 형상기억효과(Shape Memory Effect, SME)는 저온의 마르텐사이트 상에서 외부 하중에 의해 변형된 SMA가 일정 임계 온도 이상으로 가열되었을 때, 고온 안정 상인 오스테나이트로 전이되며 원래의 형상을 복원하는 현상이다. 이 과정은 결정격자 내의 비가역적인 소성변형이 아닌, 결정 구조의 가역적인 재배열을 통해 이루어진다. 둘째, 초탄성(Superelasticity)은 SMA가 오스테나이트 전이 온도 이상에서 존재할 때, 외부 응력에 의해 일시적으로 마르텐사이트 상이 유도되고, 응력 제거 시 다시 오스테나이트 상으로 복원되면서 원형이 회복되는 현상이다. 이에 변형량이 크고 응답 속도가 빠르며, 기계적 마모 없이 반복 구동이 가능하다는 특징을 갖는다[1].
SMA의 상변이는 고체 내부에서의 쌍정 변형(twinning deformation)과 같은 결정 구조적 변화에 의해 실현된다. 특히 마르텐사이트 상에서 발생하는 쌍정 변형은 외부 응력에 따라 비대칭적으로 유도되고, 복원 시에는 쌍정이 제거되며 원래 구조로 되돌아간다. 이 과정은 일반적인 금속 재료에서 관찰되는 소성변형과는 근본적으로 다르며, 재료에 물리적 손상을 가하지 않으면서 에너지 전달 및 운동 구현이 가능하다는 점에서 스마트 재료로서의 가치를 갖는다[1]. 상변이 메커니즘은 특정 온도 구간에서만 발현되며, 일반적으로 MS(Martensite start), Mf(Martensite finish), AS(Austenite start), Af(Austenite finish) 등의 임계 전이 온도로 정의된다. SMA의 작동 특성은 전이 온도들과 밀접하게 연관되어 있으며, 재료의 조성비, 열처리 과정, 외부 하중 조건에 따라 정밀하게 조정될 수 있다.
이러한 상변이적 특성을 갖는 SMA는 액츄에이터 관점에서 차별점을 갖는다. 기존 전기기계식 액츄에이터에 비해 SMA는 구조가 단순하고, 구동 시 소음이 거의 발생하지 않고, 가벼운 동시에 높은 에너지 밀도를 갖기에 다양한 응용 분야로의 적용이 가능하다[2]. 이에 SMA는 웨어러블 인터페이스와 햅틱 피드백 장치와 같은 착용형 기술 분야에서 주목받고 있다. 해당 응용에서는 유연성, 반응 속도, 경량성, 신체 밀착성 등이 핵심 설계 요소로 작용하며, SMA는 이러한 요구 조건을 충족할 수 있는 유력한 액츄에이터 소재로 평가된다. 특히 패브릭 액츄에이터 형태로 구현된 SMA는 옷감과 쉽게 통합될 수 있어, 스마트 텍스타일 기반 웨어러블 기기의 핵심 부품으로 활용 가능성이 높다[2]. 이에 SMA 패브릭 액츄에이터를 형상에 따라 분류하여 구조적 특성과 기계적 성능을 분석함으로써 살펴보고자 한다.
|
Fig. 1 SMA phase transformation and crystal structure |
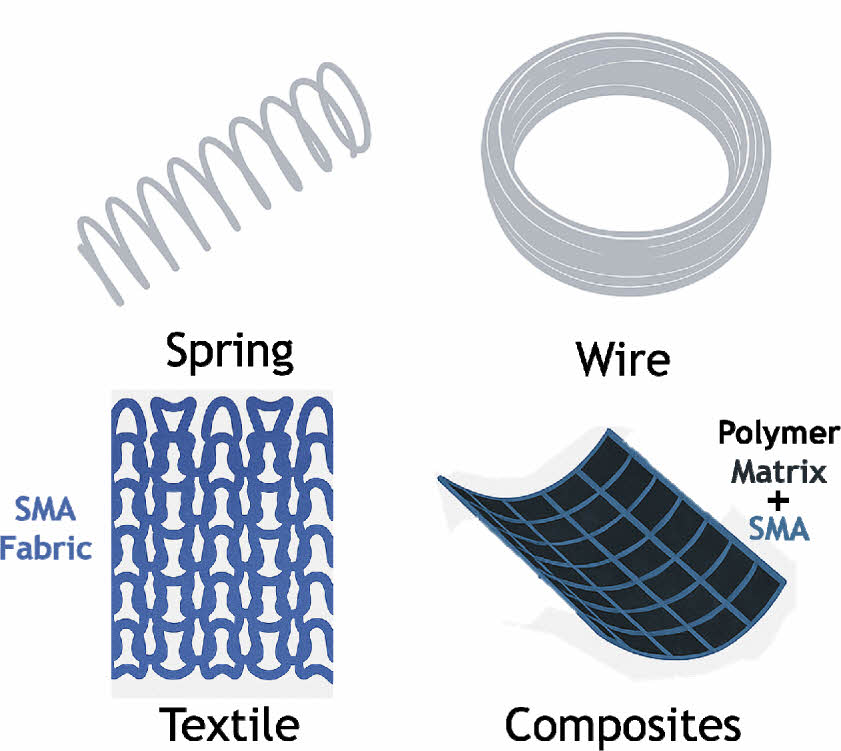
SMA는 특정 온도 조건에서 상전이를 통해 형태를 복원하는 금속 합금으로, 이를 활용하면 모터 없이도 수축, 굽힘 등의 동작을 구현할 수 있어 구조가 단순하면서도 기능성이 높은 액츄에이터 소재로 주목받고 있다. SMA 액츄에이터의 구조는 열전달, 변형 범위, 응력 분포 및 제어 복잡도 등을 결정하며, 이는 곧 응답속도, 출력, 반복성 등 주요 성능 지표로 이어진다[4,5]. 예를 들어, 선형 구조는 응답이 빠르고 출력이 높지만 변위가 제한적이며, 반대로 스프링 구조는 긴 변위와 유연성이 높지만 제어가 복잡해지는 경향이 있다[4-6]. 본 절에서는 Fig. 2와 같이, SMA 액츄에이터가 갖는 다양한 구조 형상에 따라 설계 방식, 장단점, 기계적 성능 및 적용 적합성 등을 비교함으로써 착용형 시스템에서의 구조 선택 기준과 활용 가능성을 제시하고자 한다.
2.1 선형 SMA 액츄에이터
선형 SMA 액츄에이터는 가장 단순한 구조 형태로, 일반적으로 니켈-티타늄(NiTi) 합금 금속선을 직선 상태로 사용한다[4]. 전기 저항에 의한 줄 가열(Joule heating)로 온도를 상승시키면, 마르텐사이트 상이 오스테나이트 상으로 전이되며 원래의 형태로 수축된다. 외부 복잡한 메커니즘 없이 구현되며, 구조적 단순성과 소형화의 장점으로 인해 다양한 정밀 기기, 햅틱 디바이스, 의료용 장치 등에서 널리 사용되며, 복원력 유지를 위해 외부 스프링이나 탄성체와 조합되는 경우가 많다.
선형 SMA 액츄에이터는 단면이 작고 열용량이 낮아 약 1~2초 이내의 빠른 수축 반응을 나타내며 직경 0.1 mm 수준의 NiTi 금속선 기준으로 약 1~3 N의 힘을 발휘하고 최대 응력은 200~500 MPa 수준에 이를 수 있어 단위 출력밀도 또한 높다[3,4]. 또한 구조가 단순해 반복 동작 시 안정성이 높고, 동일 자극에 대해 일관된 수축 성능을 재현할 수 있어 반복성이 중요한 햅틱 피드백, 정밀 구동계 등에 적합하다[3,7].
2.2 스프링 SMA 액츄에이터
스프링 SMA 액츄에이터는 선형 SMA를 나선형 코일로 성형하여 제작된 구조로, 자체적으로 탄성 복원력을 내재하고 있다는 점이 큰 특징이다[5]. 열 자극을 받아 상전이가 일어나면 코일은 길이 또는 직경 방향으로 수축하며, 냉각 시에는 구조 자체의 탄성에 의해 원래 형태로 복원된다. 별도의 외부 복원 장치 없이 반복 동작이 가능하다는 점에서 구조 일체성과 안정성이 높다. 또한 코일 직경, 피치, 감은 횟수 등을 조절해 출력, 변위 범위, 반응 속도를 설계 목적에 맞게 조정할 수 있어 다양한 웨어러블 및 생체모방 시스템에 활용할 수 있다.
스프링 SMA는 선형 SMA 액츄에이터가 약 4–8%의 최대 변형률을 가지는 데 비해, 코일 구조에서는 약 20%까지 선형 변형률이 가능하므로, 예를 들어 초기 길이 50 mm인 스프링의 경우 최대 10 mm(1 cm) 수준의 신장 또는 수축을 실현할 수 있다[3,5]. 더불어 나선형 구조의 기하학적 유연성 덕분에 굽힘, 비틀림 등 다자유도 변형이 가능해, 인체의 복합 동작을 모방하거나 적응적으로 대응해야 하는 웨어러블 시스템에도 적용할 수 있다.
2.3 옷감형 SMA 액츄에이터
SMA 패브릭 액츄에이터의 대표적인 사례로 들 수 있는 옷감형 SMA 액츄에이터 구조는 크게 다음과 같이 편물형(knit-type), 매듭형(knot-type), 직물형(textile-type)으로 나뉠 수 있다. 옷감을 제조하는 방식을 얇은 두께의 선형 SMA에 적용하여 특정한 패턴 또는 방식대로 SMA 액츄에이터를 제작하는 연구에 대해 논의하고자 한다. 해당 연구들이 제시하는 옷감형 액츄에이터 설계는 기존 옷감과의 통합 측면과 착용에 편리하다는 설계 측면에서 나아감에 필수적인 연구 방향을 나타낸다.
2.3.1 편물형(knit-type) SMA 액츄에이터
Lee 등은 재활보조용 exo-glove에 적용할 수 있는 니트 구조의 SMA 액츄에이터를 개발하였으며, plain-knit와 double-knit 두 가지 모듈을 설계하였다[8]. Plain-knit는 단일 루프 구조로 높은 수축력과 굽힘 각(최대 157.90°, 평균 작동력 0.94 N)을 제공하며, Double-knit는 루프 중첩 구조로 부드러운 구동 특성(평균 굽힘 각 95.57°, 작동력 0.75 N)을 보였다. 전기 에너지 소모 측면에서는 plain-knit가 더 효율적이었다. 각 니트 모듈은 손가락 관절에 맞게 배치되어 DIP, PIP 관절에는 plain-knit, MCP 관절에는 double-knit를 적용하여 관절별 맞춤 구동을 통해 관절에 밀착되는 구동을 보였다. 총 14개의 모듈을 활용한 다자유도 제어를 통해 손가락 관절의 가동 범위(ROM)는 평균 13.71% 증가하였고, 손아귀 힘은 최대 55.01% 향상되었다. 또한 평균 피부 온도는 2.21°C 상승하며, 쾌적한 열자극 효과도 나타났다.
Lee 등은 더불어 다양한 니트 구조의 SMA 모듈 720개를 제작하여 성능을 체계적으로 분류하고 정량화하였다[9]. 구조(plain/rib knit), 선형 SMA 직경(100–250 μm), 니트 게이지(2–4 mm), 루프 비율(1×1 ~ 3×1)을 변수로 설정하였다. Plain knit는 높은 굽힘각과 구동력을, rib knit는 높은 수축률을 보였으며, R-module의 1×2 루프 비율은 낮은 전력 소모(0.07 Wh)와 안정적인 동작을 나타냈다. H-module은 rib와 plain 구조의 조합을 통해 복합 구동(굽힘+수축)이 가능했으며, 최대 0.93 N의 구동력과 0.28 Wh의 전력 효율을 보였다. 모든 니트 구조는 루프 기반 연속성으로 인해 손의 곡면에 자연스럽게 밀착되며, 높은 유연성과 착용성을 보였다. 선형 SMA는 폴리에스터 실로 절연 및 마찰 최적화 처리가 되어 있으며, 작동 시 평균 표면 온도는 38–42°C로 쾌적한 수준을 유지하였다.
2.3.2 매듭형(knot-type) SMA 액츄에이터
Zhang 등은 기존 jersey knit 기반 패브릭 액츄에이터의 한계를 극복하기 위해, 선형 SMA를 매듭지어 제작한 패브릭 액츄에이터 KAFA(Knot-Architectured Fabric Actuator)를 제안하였다[10]. KAFA는 two-petal knot를 반복해 액츄에이터 column을 형성하고, 이를 2D 구조로 확장함으로써 매듭형 액츄에이터를 구성하였다. 해당 액츄에이터는 높은 인장률(최대 118%)과 수축률(30% 이상), 최대 힘 10.3 N, 그리고 영역 간 free connection 방식 적용 시 최대 32.3 N의 힘을 발휘하였으며, 이는 자체 중량 대비 1373배에 달한다. 기존 니트 액츄에이터 구조의 미끄러짐, 짧은 회로, 힘 전달 손실 등의 문제를 개선하였고, 낮은 마찰과 적은 에너지 손실로 고효율 구동을 보였다. 또한 KAFA는 직물 유사 구조와 유연성 덕분에 착용형 설계에 적합하며, 반복 구동 시에도 손상 없이 복잡한 인체 곡률에 적응함에 따라 웨어러블 근력 보조 장치, 적응형 그리퍼, 기능성 컵 슬리브 등의 실증이 가능함을 보였다.
Oh 등은 선형 SMA를 음의 푸아송 비(auxetic)를 갖는 re-entrant 구조로 매듭지어 제작한 WHAF (Wearable Haptic Auxetic Fabric)를 제안하였다[11]. 각 유닛 셀은 두 개의 선형 SMA를 매듭지어 구성되며, 3차원 확장·수축이 가능한 구조를 형성하였다. Parylene 코팅을 통해 SMA의 전기 절연을 확보하고, 영역별 독립 구동(zone-specific actuation)이 가능하도록 설계되었다. 단일 컬럼 구동 시 최대 1.25 N의 출력을 생성하였으며, 400회 이상 반복 작동에서도 성능이 유지되었다. 컬럼 및 로우 수 증가에 따라 구조 강성과 단위 스트레인당 힘이 증가하는 경향이 나타났으며, 전체 영역 구동 시에는 3D 수축을 통한 형상 순응이 가능하다. 이는 WHAF의 음의 푸아송 비 구조로 인해 팔의 굴곡이나 두께 변화에도 형상 적응(self-fitting)되어 높은 밀착성과 착용 편의성을 제공한다. 영역별 독립 제어를 활용해 9가지 촉각 시나리오(위치별 수축, 스위프 등)를 구현하였고, 88% 이상의 자극 인식률을 기록하였다. 팔꿈치 착용 시에는 운동 저항 기반의 반력 피드백(kinesthetic feedback)을 주었으며, 다층 구조에서 최대 26.5 N의 힘을 보였다. 이에 WHAF는 굽힘 제한, 강성 조절, 운동 보조 등에서 활용되며, VR/AR 및 재활 시나리오에 광범위하게 활용될 수 있는 가능성을 제시하였다.
Khan 등은 직교 이방성(orthotropic) 작동 특성을 구현하기 위한 매듭 기반 SMA 패브릭 액츄에이터 WHOA (Wearable Haptics for Orthotropic Actuation)를 제안하였다[12]. WHOA는 리프 매듭(Reef knot)을 단위 셀로 활용하고, 직교 방향(x, y축)으로 배열된 auxetic SMA 패턴을 통해 양축 수축/팽창을 독립적으로 제어할 수 있는 구조를 갖는다. Parylene 코팅을 통해 영역별 전기적 절연을 이루어 축별 독립적인 구동을 보였다. WHOA는 한 축에만 전류를 인가해도 해당 축에서만 기계적 수축이 발생하는 명확한 직교 이방성 거동을 보였으며, 최대 힘은 0.61 N에 도달하였다. 100회 이상 반복함에도 구조 안정성과 구동 일관성이 유지되었고, 패턴 밀도와 단위 셀 면적에 상관없이 직교 이방성을 보였다. 구조적으로 WHOA는 음의 푸아송 비율로 인해 장력 하에서 양축으로 동시 팽창 가능하며, 손, 발등 등 곡률이 큰 신체 부위에 밀착하는 유연성과 굽힘성을 지닌다. WHOA는 x축과 y축 스트라이프 단위의 독립 제어를 통해 연장, 수축, 전단 등 복합 운동을 구현할 수 있으며, VR 내 드론 조작, 시각장애인의 방향 인지 보조 등 햅틱 인터페이스 응용에 있어 시각 피드백이 제한된 상황에서도 효과적인 tactile 피드백 기반 정보전달이 가능함을 실증하였다.
2.3.3 직물형(textile-type) SMA 액츄에이터
Shin 등은 NiTi 선형 SMA와 비활성 섬유를 루프 패턴(Stockinette stitch)으로 직조한 편물형 액츄에이터를 제안하였다. SMA(직경 200 μm)는 폴리에스터 섬유로 감싸져 전기적 단락을 방지하고 마찰 계수를 증가시켜 작동 신뢰성을 향상시켰으며, 상변이 온도(≥68°C)에서 6~8% 수축이 유도되도록 shape training 되었다. 루프 구조는 비대칭 곡률 생성 및 3D 변형을 보였는데, Course-to-wale 비율 1:1 구성에서 평균 최대 굽힘 각도는 157°로, 가장 우수한 변형 효율을 나타냈다. SMA 액츄에이터 묶음 수(1~3개)에 따라 힘이 증가하였으며, 3개 사용 시 최대 0.37 N의 힘을 보였다. 루프 기반 니트 구조는 유연성 및 순응성, 곡면 밀착성이 나타내며, 다층 구조 설계 시 부드러운 곡률 형성 및 안정성 향상이 가능하다. 해당 연구는 구조적 설계 변수(C-W 비, SMA 금속선 수, 층 구성 등) 조절을 통해, 단순 수축뿐 아니라 다층 구동, 연속 곡률 제어, 비대칭 굽힘 등을 설계하였으며, 3개의 액츄에이터를 손가락 형태로 구현한 텍스타일 그리퍼를 통해 평면, 곡면, 비정형 물체를 안정적으로 파지하였다.
지그재그 형태의 ZSMA(Zigzag Shape Memory Alloy) 기반 패브릭 액츄에이터는 Shin 등에 의해 설계되었다. ZSMA는 곡률부와 직선부가 반복되는 2D 평면 구조로, 압축과 확장이 고정된 두께 내에서 가능하도록 설계되었다. 주요 설계 변수(곡률 반경, 초기 각도, 직선 길이, 두께, 노드 수)를 바탕으로 수학적 모델링과 설계 최적화를 수행하였으며, SMA의 기계적 및 열변형 특성이 통합된 모델을 통해 정량적 응답을 예측하였다. ZSMA는 기존 코일형 SMA보다 집적성과 열효율이 우수하였으며, 70°C에서 약 51.9 mm 수축, 40% 이상 수축률, 최대 1N 하중 하 구동을 보이며 실험과 모델 결과 간 높은 상관관계를 보였다. 반복 구동으로 수축량이 약 30% 감소하는 경향이 있었으나, 다중 ZSMA 번들링을 통해 이를 보완하여 최대 20 N의 힘을 보였다. 전체 시스템은 1.5 mm 두께, 7.5 g의 경량, 10–12 Ω의 전기 저항을 갖추어 착용형 기기에 적용하였다. 손가락 굽힘, 드론 방향 제어, 팔꿈치 보조 동작 등의 실제 응용을 보였다. 80°C에서 최대 30.25 N의 힘을 보였으며, 반복 구동에서도 성능 안정성을 유지하였다.
2.4 복합 다층형 SMA 액츄에이터
Xie 등은 재활용 소프트 웨어러블 장갑에 복합 구조 기반 SMA 액츄에이터 Glove-SSCS(Shape memory alloy Spring–Steel Composite Structure)를 제안하였다. 해당 복합구조는 active layer(SMA 스프링), passive layer(망간강 시트), sensing layer(굽힘 센서), connection layer(나일론 스트랩)으로 구성된 다층 복합 구조를 기반으로 한다. 손가락의 굴곡에는 1개의 SMA 스프링, 신전에는 2개의 스프링이 탑재되어 개별 구동이 가능하도록 설계되었다. Glove-SSCS는 선형 SMA 구동에 비해 효과적인 굽힘을 만들며, 손가락 관절의 형태에 맞춰 정밀한 토크 전달과 변위 제어를 보였다. 손가락을 굽힐 때와 펼 때 각각 약 10–13 N, 6 N의 힘을 주며, 변형 각도는 굽힐 때 90–110°, 펼 때 30–40°, 작동 주기는 각각 13–19초, 11–13초의 결과를 보였다. passive layer는 SMA 작동 후 복원력을 주며, 에너지 저장 및 냉각 보조 기능을 수행했다. 특히 passive layer 내 망간강 시트는 단순 지지체가 아닌 에너지 복원 메커니즘으로 작동하며, SMA의 수축력을 일시적으로 저장한 뒤, 냉각 후 형상 복원을 유도하여 구동의 안정성과 반응성을 올렸다. SSCS 장갑은 착용이 편리한 경량 구조(약 120 g)로 제작되었으며, 모듈식 설계를 통해 독립적인 작동 및 제어가 가능하여 다자유도 손 제스처를 구현하였다. 동시에 최대 손끝 힘은 약 7.4 N으로, 물체 파지 및 재활 트레이닝에 충분한 힘을 착용자에게 전달할 수 있었다.
Han 등은 다자유도 변형이 가능한 직물 기반 복합 다층형 구조인 Shape Memory Textile Composites (SMTCs)를 제안하였다. SMTC는 NiTi 선형 SMA, 나일론, 유리섬유로 구성된 복합 직물을 기반으로 하며, 경사(warp) 방향에는 패브릭 SMA 액츄에이터, 나일론, 유리섬유를, 위사(weft) 방향에는 유리섬유를 배치한 후, 이를 PDMS 매트릭스에 삽입하여 진공백 몰딩 방식으로 제작하였다. 직조 방식(plain, satin), 층 배열([0/0/90], [45/45/-45]), 삽입층 수에 따라 구조적 변형 특성이 달라진다. SMTC는 단일 구조로부터 다양한 변형 거동(굽힘, 비틀림 등)을 유도할 수 있으며, 변형 방향과 세기는 섬유 배열과 적층 각도를 통해 제어된다. Plain 직조는 최대 200° 굽힘, [45/45/-45] 배열은 최대 250° 굽힘 및 비틀림 동작까지 구현하였다. [0/0/90] 배열은 최대 50 mm 하향 변형, [45/45/-45]는 30 mm 상향 변형의 구별된 거동을 보였다. 나일론 포함 시 blocking force는 최대 0.53 N으로 증가하였으며, 이는 유리섬유 단독 대비 약 5배 향상된 값이다. 해당 구조는 단일 SMA 구동만으로도 복합 다자유도 운동이 가능함을 입증하였으며, 드론 날개, 적응형 표면 구조, 웨어러블 햅틱 장치 등 다양한 소프트 로보틱스로의 응용 가능성을 보였다.
Oh 등은 auxetic meta-design이 적용된 장갑형 웨어러블 햅틱 인터페이스, GAWH(Glove-type Auxetic Wearable Haptic)를 제안하였다. GAWH는 3×4 re-entrant unit으로 구성된 엘라스토머 프레임에 meta-structured SMA(mSMA)를 삽입하여, 손가락을 감싸는 원통형 복합 구조로 설계되었다. 음의 푸아송 비(Poisson’s ratio)를 기반으로 다양한 손가락 굴곡에 자율적으로 적응하며, mSMA는 손가락 관절별로 삽입되어 독립적 작동 및 피드백 제공이 가능하다. mSMA는 in-plane 수축과 out-of-plane 압축을 유도하며, 최대 1.8 N의 압력을 생성한다. 최적 작동 범위는 1.5–2.0 A로 설정되며, 전류 조절을 통해 빠른(0.1초 이내) 혹은 느린(5초 이상) bandwidth 내 촉각 피드백을 구현하였다. mSMA가 삽입된 구조는 착용자의 손가락 길이 및 굵기에 맞게 형상에 따라 적응하며, 각 손가락 마디에 피드백 유닛이 배치되었다. 전체 프레임 강성은 mSMA 삽입 후에도 2% 이내 증가에 그쳐 유연성이 유지되며, 굽힘 강성은 5배 이상 향상되어 정적 압력, 진동 피드백, 반력 피드백을 통합적으로 만들 수 있어 현실감 높은 전달이 가능한 복합 촉감 피드백을 구현했다. 해당 연구는 향후 각 손가락 세그먼트에 개별적이고 정밀한 촉각 피드백을 만드는 착용형 인터페이스로의 확장성을 보였다.
|
Fig. 2 Various structures of SMA fabric actuators |
형상기억합금은 박판, 선형 등 다양한 형태로 가공이 가능하며, 온도 변화에 따른 초탄성 및 형상기억 효과를 활용해 유연한 구조로 구현할 수 있는 점에서 소프트 액츄에이터 개발에 매우 적합한 소재로 주목받고 있다. 특히, 소형화 및 경량화가 용이하다는 특성 덕분에 마이크로 단위의 정밀한 액츄에이터부터 복잡한 인체 움직임을 보조할 수 있는 웨어러블 슈트에 이르기까지 폭넓게 적용되고 있다. 이러한 SMA 기반 웨어러블 액츄에이터는 근육이나 관절의 움직임을 모사하여 실제 인체의 생체역학과 유사한 보조력을 생성하는 데 활용되며, 착용자의 움직임을 방해하지 않도록 설계된 소형, 플렉시블(flexible)한 형태의 디자인이 핵심 기술 중 하나로 자리 잡고 있다. 또한 SMA의 반복 가능한 수축·이완 특성을 이용하면 다양한 형태의 움직임 구현이 가능하기에, 이를 피부에 적용하여 촉각 자극을 전달하는 햅틱 디바이스로의 응용도 활발히 이루어지고 있다. 본 절에서는 이러한 SMA 기반 웨어러블 액츄에이터가 실제 착용형 시스템에 어떻게 통합되고 있는지, 그리고 디자인 단계에서 고려되어야 할 인체 인터페이스 요소들은 무엇인지에 관해 기존 연구를 바탕으로 정리하고자 한다.
3.1 착용형 보조 인터페이스
신체 움직임을 보조하는 웨어러블 장치는 일반적으로 관절에 직접 토크를 가하는 하드 타입과, 와이어 등의 유연한 매체를 통해 간접적으로 토크를 전달하는 소프트 타입으로 구분된다. 하드 타입은 구조적으로 직관적이며 제어가 상대적으로 용이하지만, 인체의 복잡한 자유도를 충분히 반영하기에는 한계가 있다. 단편적인 예시로 무릎 관절을 단순히 1 자유도의 회전 관절로 모델링하여 모터를 통해 토크를 가할 수는 있으나, 실제 무릎은 3 자유도 이상의 복합 관절 구조를 가지기에, 이러한 단순화는 실제 자연스러운 동작을 저해할 수 있다. 이러한 문제를 극복하기 위해, 신체의 다자유도 움직임 저해하지 않으며 힘을 전달할 수 있는 소프트 타입 웨어러블 장치에 관한 연구가 활발히 진행되고 있으며, 형상기억합금은 이를 위한 핵심 소재 중 하나로 주목받고 있다. 소프트 타입은 큰 틀에서 실제 근육과 관절의 움직임을 모사하여 유사한 생체역학적 보조력을 생성하는 방식과 인체의 움직임을 방해하지 않도록 유연성과 순응성을 확보한 채, 외력 없이 보조력을 부드럽게 전달하는 방식으로 분류할 수 있다.
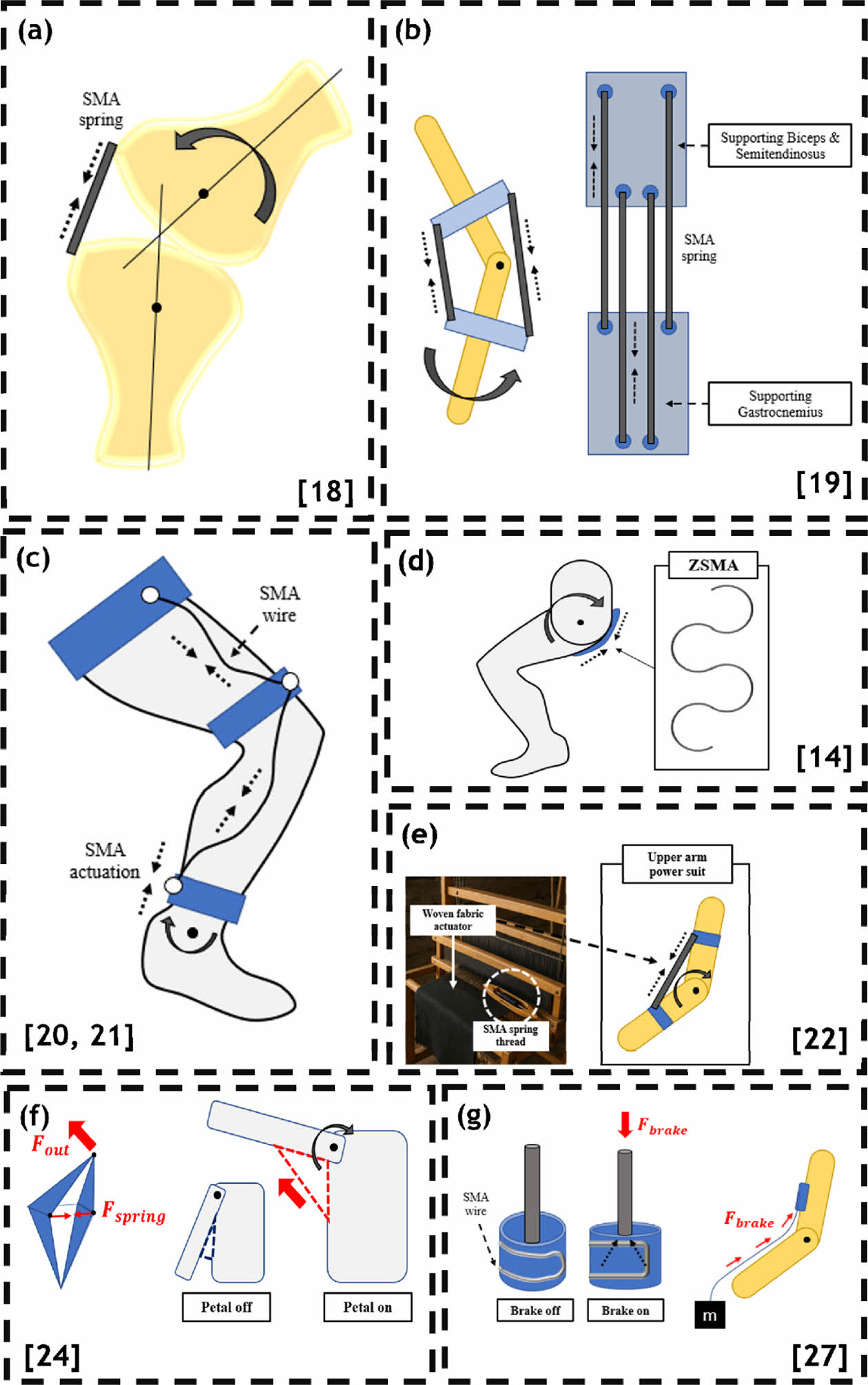
웨어러블 슈트는 주로 하지의 움직임을 보조하는데, 이는 발목, 무릎, 골반 등 복잡한 구조를 가진 관절과, 이를 연결하는 무수한 근육의 선형적인 움직임으로 이루어진다. 형상기억합금은 선형, 스프링 등의 형태로 이런 근육과 관절의 움직임을 모사하는데 유용하기에 이를 바탕으로 움직임을 분석하고 보조하기 위한 연구가 이루어지고 있다. Seo 등은 rolling, sliding, spinning의 움직임 가지는 실제 무릎의 움직임을 모사하기 위해 실제 무릎 관절 모형을 대상으로 근육 역할을 하는 20개의 스프링 형태 형상기억합금(이후 SMA로 축약함)을 사용해 활성화되는 근육의 위치에 따른 무릎 관절의 움직임 궤적을 고찰하였으며, 특히 근육에 문제가 있는 환자들의 움직임을 모형을 통해 구현해 환자들의 보조할 수 있는 웨어러블 장비에 적용할 수 있는 관절 움직임에 대한 고찰을 진행했다[18].
Ali 등은 관절이 아닌 근육 실제 근육의 움직임을 모방한 웨어러블 장치를 연구했다. Biceps femoris, gastrocnmeius 등 무릎 관절을 작동시키는 주요 근육의 움직임을 SMA 스프링으로 구현하여 PID 기반 제어를 통해 0°에서 50°의 무릎 관절 구동을 구현했으며 온도 제어방식을 통해 구동 시간을 최소화했다[19]. Kim등과 Piao 등은 일반적인 걷기 과정에서 발목 움직임을 보조하기 위한 선형 SMA 기반 smart cloth의 설계와 제어에 대한 연구를 진행하였다[20,21]. 선형 SMA로 발목의 soleus muscle을 모사해 보조하는 과정에서 착용자가 느낄 수 있는 불필요한 감각을 최소화하기 위한 설계 통해 500 g 이하의 무게를 가지면서 발목에 100 N∙cm의 토크를 발생시켰다. 상기의 연구들은 SMA의 유연성과 높은 출력밀도를 활용하여, 기존 하드웨어 기반 액츄에이터로는 구현하기 어려운 유기적인 하지의 보조 움직임을 가능하게 함을 보여준다. 또한, 인체의 다양한 자유도를 모사하고 반응성 있는 제어를 실현하기 위한 디자인 전략이 SMA 기반 웨어러블 슈트 설계의 핵심 요소임을 시사한다.
실제 근육의 움직임을 모사한 액츄에이터는, 주로 신체의 균형을 유지해야 하는 동작에서 활용된다. 이는 움직임 과정 중 근육에서 발생하는 힘 외에 불필요한 외력이 작용하지 않도록 설계되어야 하며, 대표적으로 걷기와 같은 하지 움직임에 적용된다. 반면, 특정한 동작 자체를 보조하는 데 초점을 맞춘 경우에는 근육이나 관절의 생체역학적 모사보다는, 필요한 보조력을 효율적으로 전달하면서 착용자의 움직임을 저해하지 않는 설계가 중요하다. 예를 들어, Shin 등은 리프팅 동작 보조를 위한 액츄에이터를 제안하였다[14]. 해당 연구에서는 반복적이고 고정된 동작을 대상으로 하여, 근육 모사 대신 지그재그 형태의 SMA 스프링을 최적 설계함으로써 유연성을 확보한 채 최대 10N 이상의 보조력을 전달할 수 있는 구조를 구현하였다. Park 등은 스프링 형태의 마이크로 SMA와 직조 직물 방식을 결합한 패브릭 액츄에이터의 설계를 통해 상지 전완부의 움직임을 보조하는 슈트의 설계를 진행했다[22]. 전통적인 직물 방식을 도입시켜 일반적인 패브릭에 가장 가까운 액츄에이터를 제작하였으며, 이를 통해 평범한 의복과 유사한 착용감을 유지하면서 최대 100 N에 가까운 강한 보조력을 전달함을 입증하였다. 이런 고출력이 요구되는 경우와 달리 작아도 집중적인 힘이 필요한 경우가 존재한다.
Jeong 등은 손목의 움직임이라는 좁은 영역에 힘을 집중시키기 위해 냉각을 가속시키는 냉각 튜브에 구속된 SMA 스프링을 활용해 손목의 회전 움직임을 보조하는 기구를 설계했다[23]. 또한 여러 구조물과 결합해 원하는 방향으로 힘을 전환시키는 경우도 존재하는데, 어깨 구동이 불편한 환자를 보조하기 위해 SMA 스프링과 origami 구조를 결합시켜 스프링 수축에 따라 어깨 굴곡과 신전을 보조하는 petal mechanism의 설계를 통해 어깨에 집중적인 보조력을 가할 수 있음을 확인했다[24]. 이 외에도 구조물의 결합해 어깨 신전을 보조할 수 있도록 어깨 각도에 따라 스프링의 방향을 바꿀 수 있는 링크 구조를 결합하거나[25] 밴드를 이용해 선형적인 스프링의 운동을 회전으로 바꾸는[26] 등 SMA와 구조물의 결합을 통한 다양한 보조력 생성 가능성을 탐색하였다. 한편, SMA의 수축력을 이용해 관절을 능동적으로 움직이는 방식과는 반대로, 외력을 억제하거나 자세를 유지하는 수동적 보조 형태도 존재한다. 대표적으로 Lee 등은 SMA를 이용한 튜브 형태의 브레이크를 설계해 가해지는 외력에 대해 브레이크를 작동시켜 자세 유지에 필요한 힘을 최소화하도록 활용하는 연구가 진행되었다[27].
3.2 착용형 햅틱 인터페이스
햅틱(haptic) 기술은 시각이나 청각과 같은 전통적인 감각 채널이 아닌, 촉각을 통해 정보를 전달하는 인터페이스 기술로 정의된다. 사용자의 피부에 기계적 자극을 가함으로써 다양한 촉감을 유도하고, 이를 기반으로 사용자가 정보를 인식하게 하는 원리이다. 이러한 햅틱 장치는 구동 방식과 소재에 따라 크게 하드 타입과 소프트 타입으로 구분된다. 하드 타입은 일반적으로 전동 모터와 기어 메커니즘을 이용해 비교적 강한 자극을 고속으로 전달할 수 있는 장점을 가지지만, 기계적 구조로 인해 사용자의 피부에 불필요한 압박감이나 이질감을 유발할 수 있다는 한계를 지닌다. 반면, 연성 소재 기반의 소프트 햅틱 장치는 피부 친화성과 유연성 측면에서 우수하며, 착용자의 움직임을 방해하지 않으면서도 정교한 촉각 자극을 전달할 수 있어 웨어러블 디바이스와의 통합에 유리하다. 이 중 SMA은 온도에 따라 유연하게 구부러지고 복원되는 형상기억 효과와 높은 초탄성 특성을 동시에 갖추고 있어, 열감각과 기계적 변형을 동시에 전달할 수 있기 때문에 다양한 촉각 피드백을 구현할 수 있는 소프트 햅틱 구동 소재로 주목받고 있다.
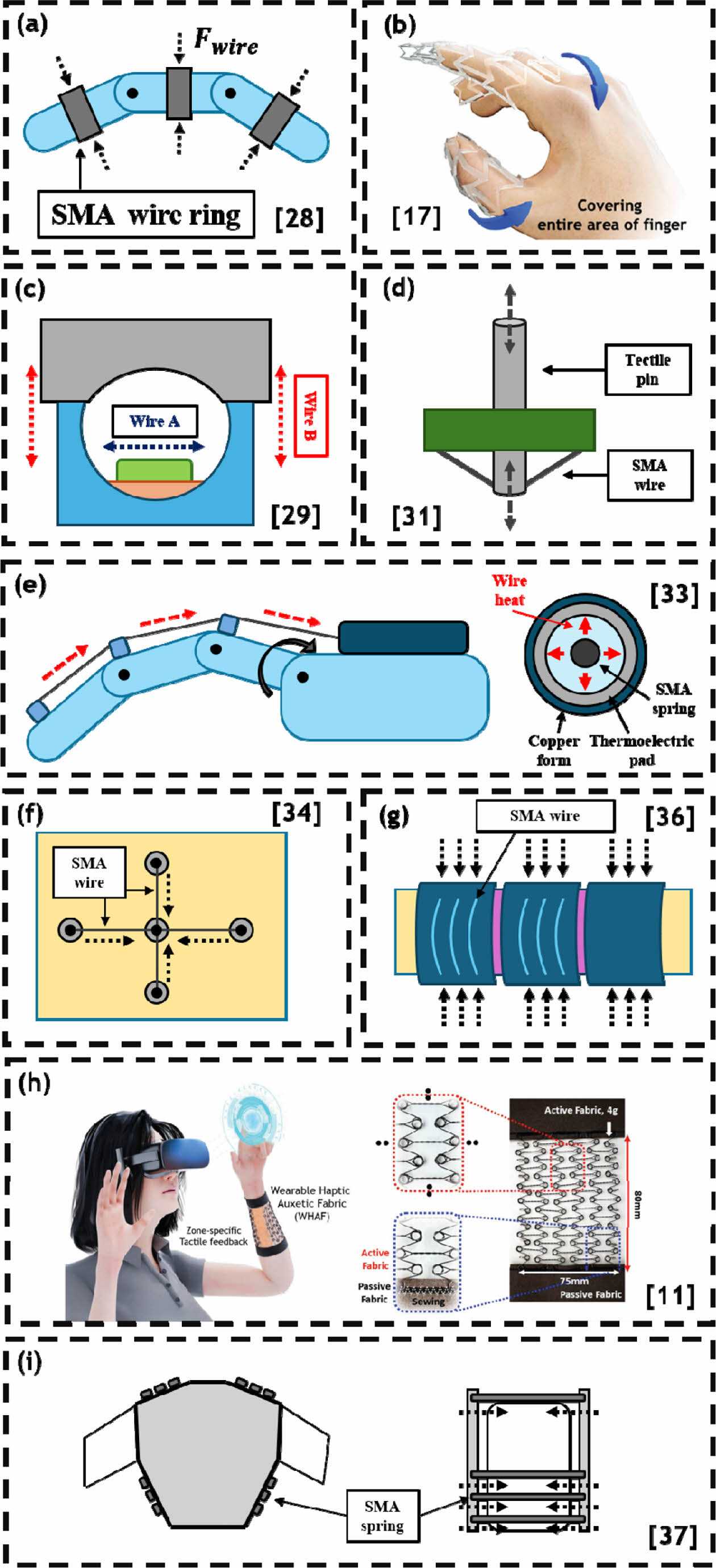
SMA는 목적에 따라 다양한 형태로 변형이 가능하기에 손끝부터 시작해서 사람이 촉감을 인식할 수 있는 장소 대부분에 활용하기 위해 여러 방식으로 연구가 진행되고 있다. 특히 손은 신체 중 가장 높은 촉각 민감도를 가지는 부위이기에, 이를 대상으로 한 햅틱 디바이스의 연구가 활발히 진행되고 있다. Chernyshov 등은 SMA 기반 햅틱을 손가락에 적용한 가장 기본적인 형태의 연구로, 선형 SMA를 링 형태로 손가락 각 마디에 장착시켜 구동을 통해 링이 있는 각 마디에 대한 촉감 전달을 구현했다[28]. 이와 유사성을 갖는 연구에는 음의 푸아송비를 가지는 re-entrant 구조를 SMA로 구현함으로써 더 넓은 범위의 손가락 마디에 압축력을 전달하는 연구가 진행되었다[17]. Hwang 등은 손끝에 집중적으로 감각을 전달하기 위한 SMA 구조물에 대한 연구로, 선형 SMA와 스프링 SMA를 결합시킨 구조물을 통해 손끝에 수직, 수평 방향의 2 자유도 구동을 구현했으며[29], Lim 등은 더 복합적인 매커니즘을 통해 5 자유도 이상의 구동을 달성해 손끝에 느껴지는 감각의 방향성까지 구현하는 결과[30]를 보였다. 이러한 구동 자유도 설계와 다르게 접근한 연구로는, SMA를 이용해 서로 독립적으로 구동할 수 있는 소형 pin 액츄에이터 배열을 구현해 16개의 pin을 이용해 질감과 같은 연속적인 촉감 정보나 점자 형태의 이산적인 정보를 손끝에 전달하는 시스템을 구현했다[31].
한편, 피부의 촉감적인 자극뿐만 아니라 손가락의 움직임을 제한하거나 반발력을 전달함으로써 역학적인 감각을 부여하는 연구도 이루어지고 있다. 각 손가람 움직임에 반발력을 줄 수 있게 SMA 스프링을 배치해 필요한 타이밍에 스프링을 구동하여 손가락에 반발력에 의한 역학적인 감각을 전달하는 구조를 사용하고 있다[32]. 힘의 전달 측면에선 스프링이 효율이 높기에 대부분 이와 동일한 방식을 채용하며, 펠티어 소자로 스프링의 구동 주파수를 높이는 방안[33]을 탐색하는 등 해당 구조에서 스프링을 보조하기 위한 연구가 진행되기도 한다. 이처럼 손가락은 높은 촉각 민감도와 작은 구동 범위를 요구하기 때문에, SMA의 유연한 설계 자유도가 특히 유리하게 작용하는 부위이다. 이에 기반한 다양한 구조 및 구동 방식의 연구는 손끝을 통한 촉감의 다양성과 정확도를 향상시키기에 크게 기여하고 있다.
SMA는 손가락에 국한되지 않고, 신체 여러 부위에 촉감을 전달하기 위한 햅틱 디바이스로도 활발히 연구되고 있다. 특정 범위에만 감각을 전달하는 용도로 외부 다른 물질과 결합하는 방식이 사용되기도 하는데[38,39], 일반적으로 SMA 스프링으로 피부 위의 특정 지점을 서로 연결한 형태를 사용한다[34,35]. 이 구조에서는 구동 시 해당 지점이 서로 당겨지면서 피부에 물리적 감각을 전달한다. 해당 기본 매커니즘을 기반으로 자유도를 높이거나, 다른 구조물을 통해 당겨지는 힘을 더 강하게 하는 등 개선 방안을 연구하곤 한다. 이때 더 넓은 범위로 감각을 전달하기 위해 넓은 배열 형태로 제작해 주로 전완부를 감싸는 형태를 가진다. Muthukumarana 등은 해당 방식을 활용한 대표적인 연구를 제안하였다. 팔을 감싸는 팔토시에 평면 스프링 형태의 SMA를 구역별로 배치하여 구역별 구동을 통해 이산적인 정보뿐 아니라 연속적인 정보를 모두 전달할 수 있기에, 쓰다듬과 같은 연속적인 정보전달로 심리적 안정감을 유도하는 햅틱 디바이스를 구성했다[36]. 또한 이와 유사하지만 매듭 SMA 패브릭 액츄에이터로, 착용자에 대한 순응성과 구역별 수축을 통한 정보를 전달한 연구 또한 제시되었다[11,12]. 더 넓은 범위의 경우 조끼 형태로 발전시킨 연구가 존재하는데, 해당 연구에서는 조끼 내부에 SMA 스프링을 장착해 전신에 걸쳐 압박 자극을 제공하고, 포옹과 유사한 감각을 전달함으로써 정서적 안정 효과를 실현, 검증하였다[37]. 이처럼 SMA 기반 햅틱 디바이스는 특정 부위의 감각 자극을 넘어서 신체 전반에 걸쳐 다양한 형태로 확장되고 있다. 구조적 설계와 감각의 유형에 따라 정밀한 정보 전달부터 정서적 안정까지 다양한 기능을 수행할 수 있어, 향후 의료, 복지, 감성 인터페이스 등 여러 분야에서의 활용 가능성을 더욱 넓혀가고 있다. Fig. 3 Fig. 4
|
Fig. 3 Schematic diagram of SMA fabric actuator-based wearable assistive interface |
|
Fig. 4 Schematic diagram of SMA fabric actuator-based haptic interface. Reproduced with permission from Ref. [11,17]. Copyright 2023, 2025, Wiley VCH |
SMA 기반 패브릭 액츄에이터는 그립, 굽힘, 비틀림 등 다양한 동작을 정밀하게 구현할 수 있어 로봇, 의료, 착용형 시스템 등 여러 분야에서 활용되고 있다. 특히 소형화와 전기적 구동이 용이한 특성을 바탕으로, 웨어러블 디바이스 및 가상현실 인터페이스 등 인간-기계 상호작용(HMI)을 위한 핵심 기술로 주목받고 있다. WHAF(Wearable Haptic Auxetic Fabric)는 전완에 착용할 수 있는 섬유형 SMA 기반 햅틱 장치로서, 공간적·시간적으로 분리된 촉각 피드백을 제공할 수 있는 장점을 가진다. 원격 탐사로봇 제어 시 WHAF는 장애물의 방향 정보를 실시간으로 촉각 형태로 전달하여, 시야가 제한된 상황에서도 정밀한 경로 제어가 가능함을 입증하였다(Fig. 5a). 이는 특히 시각 정보가 제한적이거나 지연되는 원격 조작 환경에서 유의미한 햅틱 인터페이스 대안이 될 수 있다. 또한, 전동 킥보드 기반 내비게이션 시스템에서는 사용자의 팔에 착용된 WHAF를 통해 촉각 신호만으로 좌우 회전 및 전진 등의 방향 정보를 전달받을 수 있었으며(Fig. 5b), 실제 주행 시간도 시각적 내비게이션과 큰 차이 없이 구현되었다.
이와 같이 WHAF는 높은 햅틱 해상도와 부위별 제어가 가능하다는 장점이 있으나 개선될 가능성 또한 탐색할 수 있다. 전완부와 같은 큰 표면에 대해 국소적인 피드백이 가능하도록 소재 및 구조적 최적화가 필요하다. 이에 다층 구조나 수직 방향의 액추에이션 설계를 통해 공간 해상도를 더욱 높일 수 있으며, 착용 시 전력 효율성과 장시간 사용 시 피부 발열 문제에 대한 보완이 가능하다.
KAFA는 두 개의 Petal로 구성된 매듭 구조를 통해 기존의 jersey-knitted 구조보다 우수한 기계적 강도, 높은 수축률, 그리고 균일한 전기적 가열 응답이 나타난다. KAFA는 실제 직물 형태로 손쉽게 착용이 가능하며, 착용형 레이어 구조로 확장 시 큰 구동력을 얻을 수 있어 착용형 디바이스로서의 응용성이 크다. 예를 들어, 소매형 장치로 제작된 KAFA는 저전압 입력으로도 무거운 짐가방을 들어올릴 수 있어(Fig. 5c), 재활 보조기기나 일상생활 보조 웨어러블 로봇으로의 확장 가능성을 시사한다. 즉, 기계식 외골격보다 훨씬 가볍고 유연하며, 저소음, 저전력, 고안전성을 기반으로 한 실용적 웨어러블 인터페이스의 방향을 제시하고 있다.
하지만 KAFA는 높은 수축력과 기계적 강도를 지녔음에도 불구하고, 복잡한 매듭 구조와 수작업이 필요한 KAFA의 제작 공정은 대량 생산에 적합하지 않다. 이를 해결하기 위해 자동화 직조 시스템 개발, 산업용 로봇을 통한 매듭 구조 구현, 그리고 유한요소 구조해석 기반 구조 최적화 연구가 필요하다. 또한 열 자극 기반 구동에서의 응답속도 개선을 위한 열전도 경로 설계 및 복합재료 적용 연구도 중요하며, 실제 인체 움직임에 적응하는 능동제어 기반의 인터페이스 개발도 향후 방향으로 고려되어야 한다.
웨어러블 햅틱 인터페이스 분야에서는 GAWH(Glove-type Auxetic Wearable Haptic interface)와 같은 SMA 복합구조 액츄에이터에서 새로운 응용 가능성을 찾을 수 있다(Fig. 5d). GAWH는 손가락 관절 전체에 mSMA를 내장한 Auxetic 메타구조를 통해, 손가락의 굽힘 상태와 접촉 위치에 따라 압력, 진동, 강성 변화를 포함한 다중 모달 촉각 피드백을 제공한다. 이러한 특성은 기존의 끝단 진동 기반 햅틱 장치들이 지니는 촉감 정보의 제한성을 극복하고, 사용자의 몰입감을 극대화하는 데 기여한다. 예를 들어, GAWH를 이용한 가상현실(VR) 환경에서 사용자는 사과를 집는 순간의 접촉을 직관적으로 감지하고, 최적의 그립 강도를 유지할 수 있어 과도한 힘에 의한 파손을 방지할 수 있다. 또한 다양한 그립 형태에 따라 선택적으로 피드백을 전달할 수 있어 물체의 형태와 상호작용의 정확성이 크게 향상된다.
GAWH연구 역시 도전하여 발전할 부분들이 놓여있다. 손가락 단위의 다중 mSMA 제어를 통한 정밀한 피드백 구현은 뛰어나나, 전극 수 증가에 따른 회로 복잡도 및 발열 관리 문제가 존재한다. 차후에는 전극 통합 설계, 저전력 제어 알고리즘, 혹은 열 차단 레이어 설계 등의 방향으로 개선이 가능하다. 또한 VR 내 그립 강도 피드백의 정량화와 사용자 인지역치 기반의 피드백 정밀도 보정에 대한 연구가 필요하다. 이러한 연구 방향들은 SMA 기반 웨어러블 액츄에이터의 기술적 성숙도를 높이고, 메타버스 인터페이스, 원격 수술, 노약자 보조, 감각재활 등의 실질적 응용을 위한 상용화를 가속화할 수 있을 것이다.
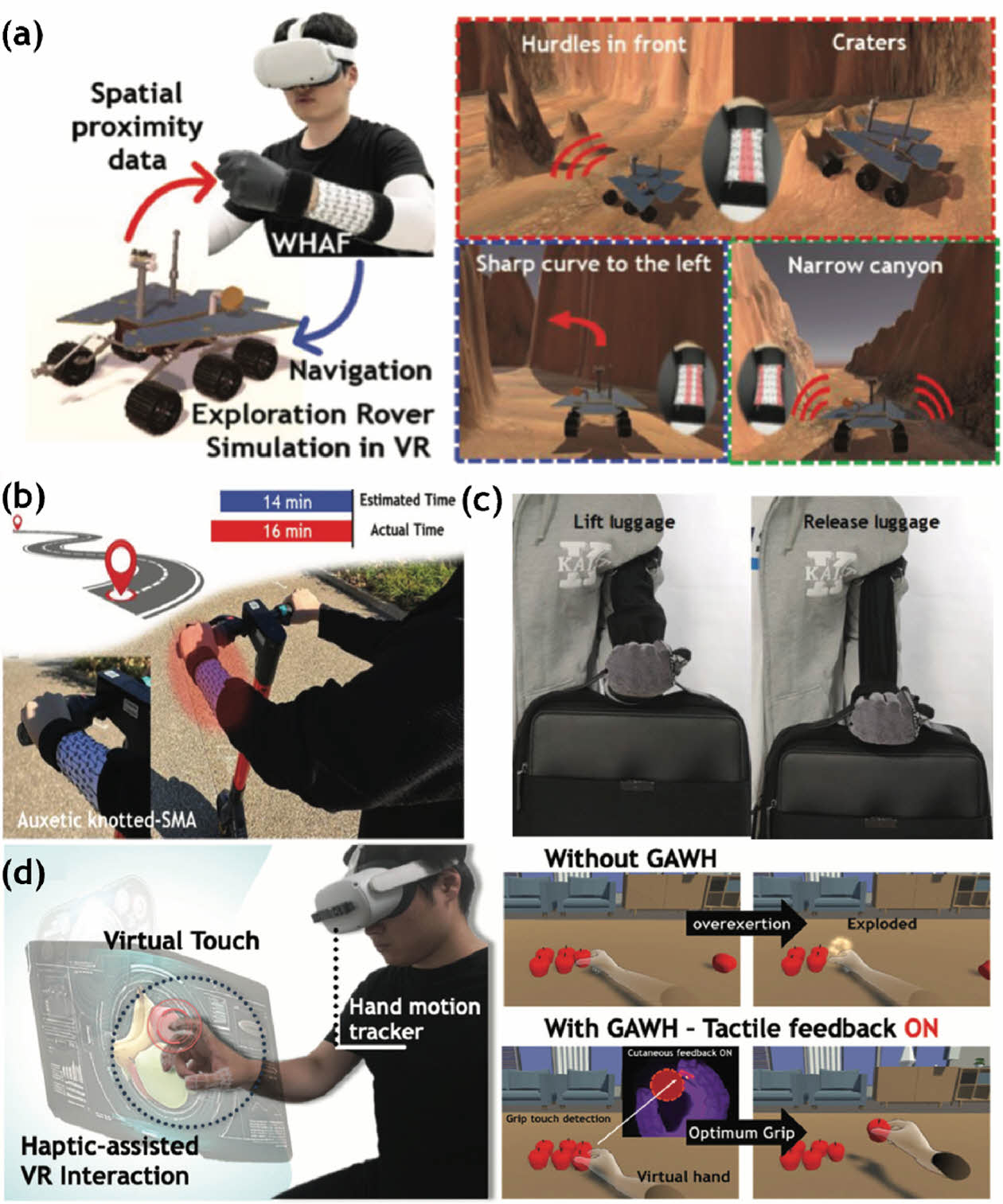
|
Fig. 5 Examples of shape memory alloy based wearable fabric actuator applications. (a) Haptic-based navigation for an exploration rover through VR simulation. Reproduced with permission from Ref. [11]. Copyright 2023, Wiley VCH (b) Guiding users on an electrical scooter without the need to rely on maps or auditory instructions. Reproduced with permission from Ref. [11]. Copyright 2023, Wiley VCH (c) A passive human model wearing the device lifted weighty luggage upon command. Reproduced with permission from Ref. [10]. Copyright 2022, Wiley VCH (d) Multi grasping modes in VR interactions. Reproduced with permission from Ref. [17]. Copyright 2025, Wiley VCH |
본 논문에서는 SMA 기반으로 한 착용형 패브릭 액츄에이터의 연구 동향을 종합적으로 고찰하였다. 다양한 형상(선형, 스프링형, 옷감형, 복합 다층형)을 통해 SMA의 고유한 열-기계적 특성을 활용하여 굽힘, 수축, 전단, 비틀림 등 다자유도 변형을 구현할 수 있음을 확인하였다. 특히 니트 및 매듭 구조는 유연성과 착용성 측면에서 높은 가능성을 보였으며, 복합 다층형 및 메타구조 기반 설계는 구조적 강성과 출력 향상을 동시에 달성할 수 있는 유효한 방법으로 평가되었다. SMA 패브릭 액츄에이터가 착용형 인터페이스로 기능하기 위해 극복해야 할 도전 과제로는 느린 열 응답성, 작동 반복 시의 피로 누적, 비효율적 열 제어, 구조 설계에 따른 복잡한 제어 등이 있으며, 이를 해결하기 위한 고속 냉각 시스템, 고탄성 재료와의 하이브리드화, 정밀한 설계 모델링 기반의 최적화 제어 연구 등 소재 및 형태의 다각적 측면으로 접근해야 한다. 또한, 복합 레이어 설계, 영역별 독립 구동(zone-control), meta-structured 설계 등은 향후 SMA 기반 액에이터의 기능적 확장을 이끌어갈 주요 기술로 주목받는다.
향후 SMA 기반 착용형 패브릭 액츄에이터는 단순한 동작 구동을 넘어, 복합 촉감용 패턴 설계, 센서 통합, 인공지능 기반 적응 제어와의 융합을 통해 적응형 재활기기, 몰입형 햅틱 인터페이스, 소프트 로보틱스 시스템, 원격 로보틱스 제어 시스템으로 진화할 수 있다. 특히, 복합 구조와 옷감형 기반 설계를 접목한 형태는 인체 곡률과 착용성에 적합할 뿐만 아니라, 의료, 스포츠, AR/VR, 로보틱스 등 폭넓은 분야에서의 실질적인 응용 가능성을 품고 있음을 명확하게 볼 수 있다.
This work was supported by the National Research Foundation of Korea (NRF) grant funded by the Korea government (MSIT) (RS-2024-00345241).
- 1. Otsuka, K., and Wayman, C.M., Shape memory materials, Cambridge University Press, 1999.
- 2. Dimitris C. Lagoudas, Shape memory alloys. Vol. 1., Springer, Boston, US, 2008.
- 3. Liu, Q., Ghodrat, S., Huisman, G., and Jansen, K.M.B., “Shape memory alloy actuators for haptic wearables: A review,” Materials & Design, Vol. 233, 2023, 112264.
-

- 4. Hamid, Q.Y., Wan Hasan, W.Z., Azmah Hanim, M.A., Nuraini, A.A., Hamidon, M.N., and Ramli, H.R., “Shape memory alloys actuated upper limb devices: A review,” Sensors and Actuators Reports, Vol. 5, 2023, 100160.
-
- 5. Shimoga, G., Kim, T.-H., and Kim, S.-Y., “An Intermetallic NiTi-Based Shape Memory Coil Spring for Actuator Technologies,” Metals, Vol. 11, No. 8, 2021, Article 1212.
-
- 6. Jani, J.M., Leary, M., and Subic, A., “Designing shape memory alloy linear actuators: A review,” Journal of Intelligent Material Systems and Structures, Vol. 28, No. 13, 2017, pp. 1699–1718.
-
- 7. Luji, F.F.J., Teo, K.T., Tan, S.F., and Yoong, H.P., “Heating and Cooling Mechanisms for SMA Actuator - A Brief Review,” Transactions on Science and Technology, Vol. 8, No. 3-3, 2021, pp. 425–431.
- 8. Lee, S.-M., and Park, J., “A soft wearable exoglove for rehabilitation assistance: a novel application of knitted shape-memory alloy as a flexible actuator,” Fashion and Textiles, Vol. 11, No. 14, 2024, pp. 1–17.
-
- 9. Lee, S.-M., Jung, W.-K., and Park, J., “Mapping actuating performance of knitted shape memory alloys and proposing design guidelines for assistive wearable applications,” Journal of Industrial Textiles, Vol. 53, No. 1, 2023, pp. 1–25.
-
- 10. Zhang, H., Oh, S., Mahato, M., Yoo, H., and Oh, I.-K., “Knot-Architectured Fabric Actuators Based on Shape Memory Fibers,” Advanced Functional Materials, Vol. 32, No. 43, 2022, 2205732.
-
- 11. Oh, S., Song, T.-E., Mahato, M., Kim, J.-S., Yoo, H., Lee, M.-J., Khan, M., Yeo, W.-H., and Oh, I.-K., “Easy-To-Wear Auxetic SMA Knot-Architecture for Spatiotemporal and Multimodal Haptic Feedbacks,” Advanced Materials, Vol. 35, No. 47, 2023, 2304442.
-
- 12. Khan, M., Oh, S., Song, T.-E., Ji, W., Mahato, M., Yang, Y., Saatchi, D., Ali, S. S., Roh, J., Yun, D., Ryu, J.-H., and Oh, I.-K., “Wearable Haptics for Orthotropic Actuation Based on Perpendicularly Nested Auxetic SMA Knotting,” Advanced Materials, Vol. 37, No. 1, 2025, 2411353.
-
- 13. Shin, J., Han, Y.-J., Lee, J.-H., and Han, M.-W., “Shape Memory Alloys in Textile Platform: Smart Textile-Composite Actuator and Its Application to Soft Grippers,” Sensors, Vol. 23, No. 3, 2023, 1518.
-
- 14. Shin, D., Kim, K., Yang, S. Y., Park, J. H., Gong, Y. J., and Choi, H. R., “Woven Fabric Muscle for Soft Wearable Robotic Application Using Two-Dimensional Zigzag Shape Memory Alloy Actuator,” Soft Robotics, Vol. 11, No. 6, 2024, pp. 1008–1019.
-
- 15. Xie, Q., Meng, Q., Yu, W., Wu, Z., Xu, R., Zeng, Q., Zhou, Z., Yang, T., and Yu, H., “Design of a SMA-based soft composite structure for wearable rehabilitation gloves,” Frontiers in Neurorobotics, Vol. 17, 2023, 1047493.
-
- 16. Han, M.-W., Kim, M.-S., and Ahn, S.-H., “Shape memory textile composites with multi-mode actuations for soft morphing skins,” Composites Part B: Engineering, Vol. 198, 2020, 108170.
-
- 17. Oh, S., Jang, J., Ji, W., Yang, Y., Khan, M., Majidi, C., Ryu, J.-H., and Oh, I.-K., “Embodied Auxetic Intelligence in a Glove-Type Wearable Haptic Interface Connecting Humans to Robots and the Metaverse,” Advanced Functional Materials, Vol. 35, No. 1, 2025, 2502222.
-
- 18. Seo, S., Kang, M., and Han, M.W., “Shape Memory Alloys Patches to Mimic Rolling, Sliding, and Spinning Movements of the Knee,” Biomimetics, Vol. 9, No. 5, 2024, 255.
-
- 19. Ali, H.F., and Kim, Y., “Design procedure and control of a small-scale knee exoskeleton using shape memory alloy springs,” Microsystem Technologies, Vol. 29, No. 8, 2023, pp. 1225-1234.
-
- 20. Kim, C., Kim, G., Lee, Y., Lee, G., Han, S., Kang, D., ... and Koh, J.S., “Shape memory alloy actuator-embedded smart clothes for ankle assistance,” Smart Materials and Structures, Vol. 29, No. 5, 2020, 055003.
-
- 21. Piao, J., Kim, M., Kim, J., Kim, C., Han, S., Back, I., ... and Koo, S., “Development of a comfort suit-type soft-wearable robot with flexible artificial muscles for walking assistance,” Scientific Reports, Vol. 13, No. 1, 2023, 4869.
-
- 22. Park, S.J., Choi, K., Rodrigue, H., and Park, C.H., “Soft exosuit based on fabric muscle for upper limb assistance.” IEEE/ASME Transactions on Mechatronics, Vol. 28, No. 1, 2022, pp. 26-37.
- 23. Jeong, J., Hyeon, K., Han, J., Park, C.H., Ahn, S.Y., Bok, S.K., and Kyung, K.U., “Wrist assisting soft wearable robot with stretchable coolant vessel integrated SMA muscle,” IEEE/ASME Transactions on Mechatronics, Vol. 27, No. 2, 2021, pp. 1046-1058.
-
- 24. Chung, C., Hyeon, K., Jeong, J., Lee, D.Y., and Kyung, K.U., “Origami-Inspired Wearable Robot for Shoulder Abduction Assistance: A Double-Petal Mechanism Utilizing Shape Memory Alloy Actuators,” IEEE Robotics and Automation Letters, Vol. 9, No. 2, 2023, pp. 1484-1491.
-
- 25. Hyeon, K., Jeong, J., Chung, C., Cho, M., Hussain, S., and Kyung, K.U., “Design of a wearable mechanism with shape memory alloy (SMA)-based artificial muscle for assisting with shoulder abduction,” IEEE Robotics and Automation Letters, Vol. 7, No. 4, 2022, pp. 10635-10642.
-
- 26. Jeong, J., Hyeon, K., Jang, S.Y., Chung, C., Hussain, S., Ahn, S.Y., ... and Kyung, K.U., “Soft wearable robot with shape memory alloy (SMA)-based artificial muscle for assisting with elbow flexion and forearm supination/pronation,” IEEE Robotics and Automation Letters, Vol. 7, No. 3, 2022, pp. 6028-6035.
-
- 27. Lee, K.S., Kim, Y., and Park, H.S., “Shape Memory Alloy-Based Reactive Tubular (SMART) Brake for Compact and Energy-Efficient Wearable Robot Design,” ACS Applied Materials & Interfaces, Vol. 16, No. 7, 2024, pp. 8974-8983.
-
- 28. Chernyshov, G., Tag, B., Caremel, C., Cao, F., Liu, G., and Kunze, K., “Shape memory alloy wire actuators for soft, wearable haptic devices,” Proceedings of the 2018 ACM International Symposium on Wearable Computers, Oct. 2018, pp. 112-119.
-
- 29. Hwang, D., Lee, J., and Kim, K., “On the design of a miniature haptic ring for cutaneous force feedback using shape memory alloy actuators,” Smart Materials and Structures, Vol. 26, No. 10, 2017, 105002.
-
- 30. Lim, B., Lee, C., and Hwang, D., “Development of embedded sensor system for 5-DOF finger-wearable tactile interface,” IEEE/ASME Transactions on Mechatronics, Vol. 26, No. 4, 2021, pp. 1728-1736.
-
- 31. Baba, Y., Igarashi, H., Liu, R., and Sawada, H., “A Pin-Array Tactile Display Using Shape-Memory Alloy Wires for the Presentation of Various Tactile Sensation,” Int. J. Innov. Comput. Inf. Control, Vol. 20, 2024, pp. 653-664.
-
- 32. Nakao, T., Kunze, K., Isogai, M., Shimizu, S., and Pai, Y.S., “Fingerflex: Shape memory alloy-based actuation on fingers for kinesthetic haptic feedback,” Proceedings of the 19th International Conference on Mobile and Ubiquitous Multimedia, Nov. 2020, pp. 240-244.
-
- 33. Seo, S.W., and Kwon, S., “Finger Kinesthetic Haptic Feedback Device Using Shape Memory Alloy-based High-Speed Actuation Technique,” Proceedings of the 28th ACM Symposium on Virtual Reality Software and Technology, Nov. 2022, pp. 1-2.
-
- 34. Messerschmidt, M.A., Muthukumarana, S., Hamdan, N.A. H., Wagner, A., Zhang, H., Borchers, J., and Nanayakkara, S.C., “Anisma: A prototyping toolkit to explore haptic skin deformation applications using shape-memory alloys,” ACM Transactions on Computer-Human Interaction, Vol. 29, No. 3, 2022. pp. 1-34.
-
- 35. Simons, M.F., Digumarti, K.M., Le, N.H., Chen, H.Y., Carreira, S.C., Zaghloul, N.S., ... and Rossiter, J., “B: Ionic glove: A soft smart wearable sensory feedback device for upper limb robotic prostheses,” IEEE Robotics and Automation Letters, Vol. 6, No. 2, 2021, pp. 3311-3316.
-
- 36. Muthukumarana, S., Elvitigala, D.S., Forero Cortes, J P., Matthies, D.J., and Nanayakkara, S., “Touch me gently: recreating the perception of touch using a shape-memory alloy matrix,” Proceedings of the 2020 CHI Conference on Human Factors in Computing Systems, Apr. 2020, pp. 1-12.
-
- 37. Foo, E.W., Dunne, L.E., and Holschuh, B., “User expectations and mental models for communicating emotions through compressive & warm affective garment actuation,” Proceedings of the ACM on Interactive, Mobile, Wearable and Ubiquitous Technologies, Vol. 5, No. 1, 2021, pp. 1-25.
-
 This Article
This Article
-
2025; 38(3): 300-310
Published on Jun 30, 2025
- 10.7234/composres.2025.38.3.300
- Received on Jun 18, 2025
- Revised on Jun 28, 2025
- Accepted on Jun 30, 2025
Services
Shared
Correspondence to
- Il-Kwon Oh
-
Mechanical Engineering Department, Korea Advanced Institute of Science and Technology
- E-mail: ikoh@kaist.ac.kr
Gangnam Mirae Tower, Suite 601, 174 Saimdang-ro, Seocho-gu, Seoul 06627, South Korea
Tel: +82-2-598-1550 Fax: +82-2-598-1557 E-mail: composites@kscm.re.kr