





- Recent Advances in Electric Stimulus-Responsive Soft Actuators
Seong-Jun Jo*, Gwon Min Kim*, Jaehwan Kim*†
* School of Mechanical System Engineering, Kumoh National Institute of Technology
- 전기자극 감응형 소프트 액추에이터의 최신 동향
조성준*·김권민*·김재환*†
This article is an open access article distributed under the terms of the Creative Commons Attribution Non-Commercial License (http://creativecommons.org/licenses/by-nc/4.0) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
Recent advances in electro-active polymer (EAP) actuators, owing to their flexibility, lightweight, and simple fabrication process, have showcased their high utility across various fields such as soft robotics, biomimetics, wearable devices, and haptic technologies. Moreover, EAP actuators are evolving into smart devices with new functions and characteristics through the integration of functional materials and innovative technologies. This paper categorizes EAPs into ionic EAPs and electronic EAPs. Ionic EAPs include, most notably, ionic polymer-metal composites (IPMCs) and conducting polymers (CPs), while electronic EAPs encompass dielectric elastomer actuators (DEAs), ferroelectric polymer actuators, and the recently introduced hydraulically amplified self-healing electrostatic (HASEL) actuators. Detailed explanations based on the latest research are provided concerning the mechanism, structure, performance improvement strategies, methods for adding functionality, and application areas for each type of actuator.
최근 전기 활성 고분자 (EAP) 액추에이터는 그들의 유연성, 경량성, 그리고 단순한 제작 과정 덕분에 소프트 로봇, 생체 모방 기술, 웨어러블 장치, 햅틱 기술 등 다양한 분야에서 높은 활용도를 보여주고 있다. 뿐만 아니라, 전기 활성 고분자 액추에이터들은 기능성 재료 및 혁신적 기술과의 결합을 통해 새로운 기능과 특성을 가진 스마트 기기로 발전하고 있다. 본 논문에서는 전기 활성 고분자를 이온성 전기 활성 고분자와 전기적 활성 고분자로 분류하였다. 이온성 전기 활성 고분자에는 대표적으로 이온성 금속-고분자 복합재 (IPMCs), 전도성 고분자 (CPs) 액추에이터가 소개되며, 전기적 활성 고분자에는 유전성 탄성체 액추에이터 (DEAs), 강유전 고분자 액추에이터, 그리고 최근 발표된 유압증폭 자가치유 정전 (HASEL) 액추에이터가 소개된다. 각각의 액추에이터에 대한 메커니즘, 구조, 성능 개선 방안 및 기능성 추가 방법 및 응용 분야에 대한 내용을 최신 연구를 바탕으로 상세히 설명하였다.
Keywords: 전기자극(Electric stimulus), 소프트 액추에이터(Soft actuator), 전기활성 고분자(Electroactive polymer), 스마트 소재(Smart material)
전기 활성 고분자(EAP)는 전기 자극에 반응하여 형태나 크기를 변화할 수 있는 스마트 재료이다. EAP는 크게 두 가지의 종류로 분류할 수 있는데, 분류 기준은 이온의 이동으로 기계적 변형이 수반되는 이온 전도성 고분자(이온성 EAP)와, 전기력 인력으로 인해 고분자에 기계적 변형을 일으키는 전기 전도성 고분자(전기성 EAP)가 있다. 전기활성 고분자 기반 소프트 액추에이터들은 구동 메커니즘부터 구성 구조, 제작 방법, 재료적 특징, 장단점 및 적용 가능한 응용 분야 등에서 많은 차이를 보이고 있다. 따라서, 소프트 액추에이터를 활용하여 더욱 정밀하고 효율적인 장치를 제작하기 위해서는 이러한 차이점을 분명하게 파악하는 것이 필요하다.
이온성 EAP는 대표적으로 이온성 금속-고분자 복합재(Ionic Polymer-Metal Composites, IPMC)와 전도성 고분자(Conducting Polymer, CP)가 있다. IPMC는 전극과 이온성 고분자로 구성되어 있으며, 전기적 자극에 의해 굽힘 운동을 생성하는 것이 특징이다[1-16]. IPMC의 응용 분야는 소프트 로봇이나 수중 로봇, 인공 근육과 같은 응용 분야에 적합한 것으로 알려져 있다. 전도성 고분자(CP)는 전기에 반응하지 않는 유연한 고분자에 부착하여 액추에이터로 제작하며, IPMC에 비해 그 구조가 매우 다양하다[17-30]. 전도성 고분자 액추에이터는 일반적으로 전해질 용액 안에서 작동하는 것이 특징이며, 직선, 굽힘, 부피 팽창 등 다양한 운동이 가능하다.
전기성 EAP의 종류에는 유전성 탄성체 액추에이터(Dielectric Elastomer Actuator, DEA)와 강유전(Ferroelectric) 고분자 액추에이터 그리고 유압증폭 자가치유 정전(HASEL) 액추에이터가 있다. DEA의 경우, 얇은 유전체 사이에 전극을 배치한 구조로, 전기적 인력에 의해 유전체가 팽창하며 구동된다[31-51]. 구동 시 높은 전압이 필요하며, 빠른 응답 속도와 큰 변형률을 나타낸다는 장점이 있다. 강유전 고분자 액추에이터는 DEA와 유사하게 전기적 인력을 기계적 변형으로 바꾸는 메커니즘을 가지고 있다[52-56]. 이 액추에이터는 강유전 고분자를 사용해 제작되는데, 대부분 압전 효과(Piezoelectrics)를 가지고 있어 미세 포지셔닝 및 정밀 제어 시스템에 적용되고 있다. 최근에 공개된 기술인 HASEL 액추에이터는 유압과 전기력의 조합을 통해 구동된다. 자가 치유라는 큰 장점이 있어 내구성과 안정성이 뛰어나 소프트 로봇이나 웨어러블 장치에 잠재력을 지니고 있다[57-70].
본 논문에서는 이러한 전기활성 고분자 기반 소프트 액추에이터들의 원리와 연구 동향을 소개하며, 각 액추에이터의 메커니즘, 구조, 성능 개선 방안, 기능성 추가 방법 및 응용 분야를 위주로 조사하고 정리하였다. IPMC의 경우, 제작 효율성, 구동 성능 및 안정성을 향상시키기 위한 다양한 접근 방식을 주로 소개한다. 또한, IPMC를 소프트 로봇이나 인간과 곤충의 동작을 모방하는 생체 모방 기술에 적용한 사례들도 정리하였다. CP의 경우에는 전도성 고분자의 성능을 개선하는 내용과 CP만의 특별한 제작 방식을 도입한 연구들을 소개하였다. DEA에서는 DE의 성능을 개선하는 고분자 합성 방법들과 DEA의 다양한 응용 분야들을 정리하였다. 강유전 고분자 액추에이터는 주로 압전 액추에이터 위주의 논문들을 조사하였고, 성능 개선 위주의 연구를 소개하였다. HASEL은 구동 원리와 구조, 성능 개선 방안, 기능성 액추에이터 제작 방법에 대해서 정리하였다. 뿐만 아니라 소프트 로봇, 햅틱 장치. 생체 모방 기술 등으로 적용된 사례들을 소개하였다.
2.1 이온성 금속-고분자 복합재 액추에이터
IPMC 액추에이터는 두 개의 전극과 하나의 이온성 고분자로 이루어진 삼중층 구조로 제작된다. IPMC 액추에이터의 구동은 전극 사이에 전압을 가하여 이온성 고분자 내부의 이온들이 전기장에 의해 이동하며 발생한다. 이온의 이동은 고분자 내에서 밀도 차이를 발생시키며, 밀도 차이로 인한 고분자 양끝의 부피 비대칭이 굽힘 변형을 일으킨다.
최근 들어, IPMC의 제작 효율성, 구동 성능 및 안정성을 향상시키기 위한 연구들이 다양하게 발표되고 있다. 특히, IPMC 제작 시간을 단축하기 위한 연구와 더불어 전극과 전해질에 새로운 소재를 적용하거나, 기계/화학/전기화학적 성능을 개선하고자 하는 연구가 주를 이루고 있다.
초기 IPMC는 금속의 이온염 용액을 이온 교환 기능이 있는 고분자의 표면에 침투시킨 후, 환원시키는 무전해도금(electroless plating) 방법을 통해 제작되었다[1,2]. 무전해 도금 방법은 보통 5~7일이 소요되는 방법이기에, 이를 줄이고자 다양한 연구들이 진행되었다. Aida et al.은 단일벽 탄소나노튜브(SWNTs)를 이온성 고분자 및 이온성 액체와 함께 섞어 버키겔(bucky gel)을 제작하고 전극으로 사용하였으며, 층별 주조 방식을 통해 기존 무전해도금 제작 방식보다 더 짧고 간단하게 IPMC를 제작하였다[3]. 버키겔 전극은 SWNTs가 13 wt%, 이온성 액체인 BMIm-BF4가 54 wt%, 이온성 고분자인 PVdF(HFP)가 33 wt% 포함되어 있으며, 제작된 액추에이터는 ±3.5V , 0.1 Hz의 입력 신호에서 최대 5 mm의 굽힘 변형을 보였다.
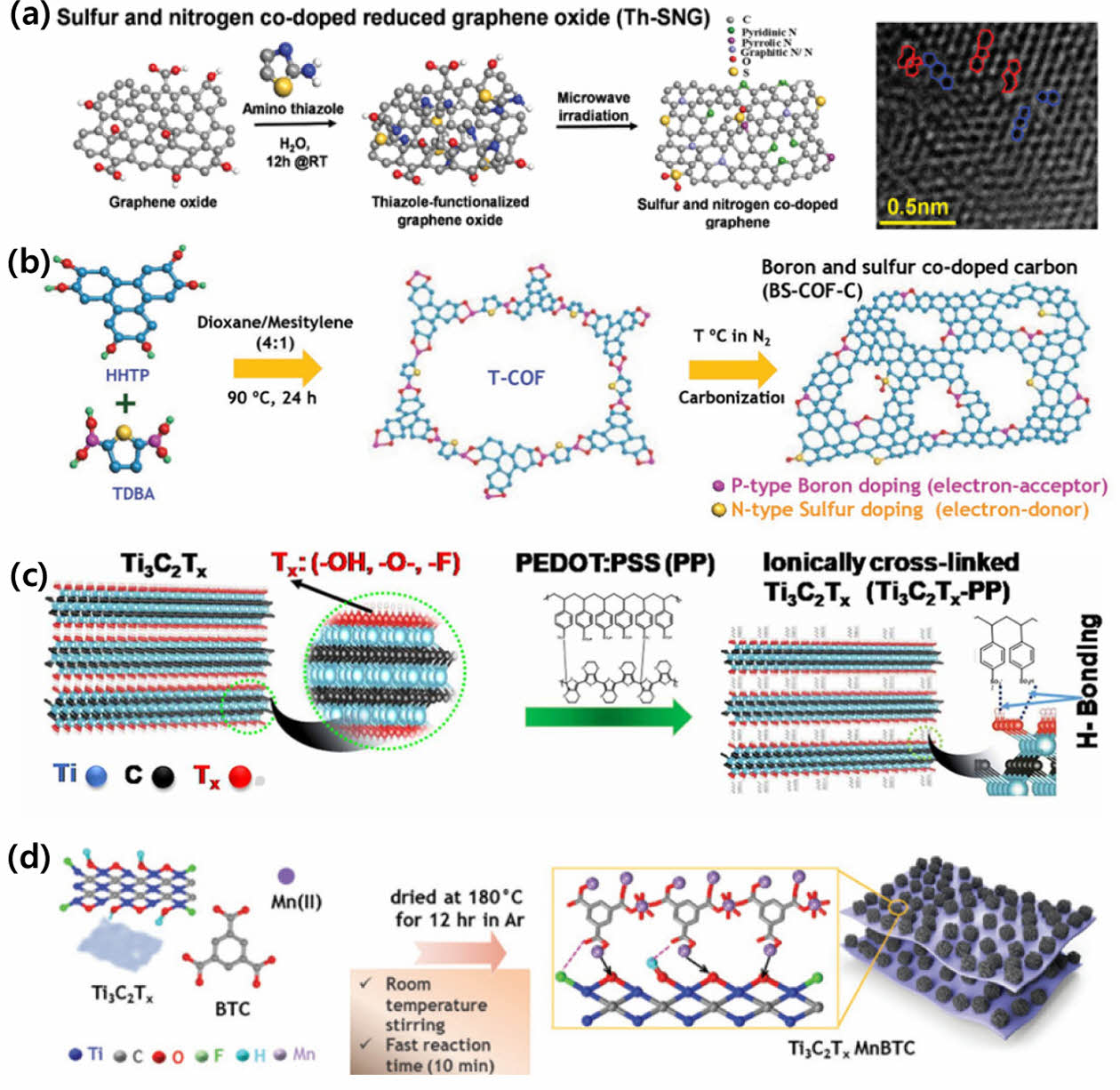
IPMC 액추에이터의 성능 향상을 위한 연구로, Oh et al.은 황과 질소가 도핑된 그래핀(Th-SNG)을 전도성 고분자인 PEDOT:PSS와 결합하여 높은 강성과 강도를 지닌 액추에이터를 개발하였다(Fig. 1a)[4]. Th-SNG/PEDOT: PSS을 전극으로 사용한 액추에이터는 ±0.5 V, 0.1 Hz의 낮은 입력 신호에서 2.3 mm의 굽힘 변위를 보였으며, 이는 같은 조건의 PEDOT:PSS 기반 액추에이터보다 약 2.5배 큰 변위였다. 뿐만 아니라 18,000 회의 구동 후에도 Th-SNG/PEDOT:PSS 액추에이터는 성능 저하없이 동일한 주파수 응답을 보여 높은 내구성을 입증했다. 또한 Fig. 1b에 나타나 있듯이, Oh et al.은 다공성 결정 물질로 주목 받고 있는 공유 유기 골격체(COFs) 중 하나인 붕소와 황이 도핑된 공유 유기 골격체(BS-COF-C)를 합성하고 이를 액추에이터 전극에 적용하였다[5]. BS-COF-C는 탄소보다 최외곽 전자가 1개 부족한 붕소에 의해 홀 전하 운반체가 생성되었고, 탄소나 붕소에 비해 높은 전자 밀도를 가진 황에 의해 전하 이동 저항이 줄어들어 높은 전자 전도성을 보였다. 900C°에서 열분해 과정을 거친 BS-COF-C900 전극 기반 액추에이터는 ±0.5 V, 0.1 Hz에서 8.60 mm의 변위를 보여주었으며, 단순 PEDOT:PSS 액추에이터에 비해 2.70배 이상의 굽힘 성능을 보이는 등 모든 실험조건에서 가장 우수한 성능을 보였다. 연구에서는 양면의 전극을 각각 BS-COF-C900와 B-COF-C900로 다르게 사용하여 전극의 성능 차이로 인한 비대칭 굽힘 동작을 보이는 IPMC 액추에이터를 제작할 수 있었다. 금속과 같은 전도성과 높은 정전용량을 가진 MXene을 최초로 전극으로 활용한 연구도 보고되었는데, 그 합성 과정이 Fig. 1c에 도시되어 있다[6]. MXene은 Mn+1XnTx 구조의 화학식으로 이루어져 있는데, 여기서 M은 Ti, Zr, V, Nb, Ta, Mo 등의 금속을 나타내며, X는 탄소나 질소를 나타내고, Tx는 O나 OH, F의 표면 작용기를 나타낸다. 또한, n은 n=1, 2, 3의 값이 될 수 있어 MXene은 20가지 이상의 다른 형태가 존재한다. 이 중 Ti3C2Tx이 가장 많이 연구되었으며, 해당 논문에서도 언급된 구조의 MXene을 사용했다. MXene 분말을 전극으로 바로 사용하면, 이온성 고분자 층에 대한 접착력이 부족하고 신축성이 낮아 박리가 쉽게 일어난다. 따라서 본 연구에서는 MXene을 PEDOT:PSS와 이온 결합하여 MXene의 문제점을 해결하였으며, 이를 통해 제작된 액추에이터는 DC 입력 신호에서 1초 이내의 작동, 매우 낮은 입력 전압 영역(0.1 to 1 V)에서 최대 1.37%의 굽힘 변형률을 보였다. 18,000 회 구동 후에도 97%의 성능을 유지하였으며, 큰 위상 지연이나 전극의 기계적 박리도 일어나지 않아 우수한 안정성을 보여주었다. Liu et al.은 MXene과 PEDOT:PSS에 은 나노 와이어를 추가적으로 결합한 MPA전극을 IPMC에 적용하였다[7]. MPA 전극은 굽힘 운동시 발생하는 MXene의 박리 현상을 보완하고, MXene과 PEDOT:PSS으로만 이뤄진 액추에이터에 비해 굽힘 변형률과 응답 시간, 전류 밀도 등에서 모두 개선된 성능을 보였다. 연구에서는 은 나노 와이어가 10% 첨가된 MPA10 기반의 액추에이터가 가장 뛰어난 성능을 보였으며, 5시간 동안의 구동에서도 91.9%의 성능을 유지하였다. 앞서 언급된 COF와 유사한 금속 유기 골격체(MOF)를 MXene과 함께 결합한 연구도 발표되었다(Fig. 1d)[8]. 망간 기반 금속 유기 골격체(MnBTC)가 Ti3C2Tx 위에 성장된 3차원 구조체를 합성하고, 이를 PEDOT:PSS와 화학적 결합 및 친수성 상호작용을 하게하여 기계적으로 유연한 전극을 제작하였다. Ti3C2Tx-MnBTC 전극 기반 액추에이터는 낮은 DC 구동 전압(0.5 V)에서 0.77 s의 반응 속도와 12.5 mm의 굽힘 변위를 나타냈으며, 43,200 s 동안 작동 성능의 저하 없이 98%의 성능을 유지해 뛰어난 안정성을 보였다. 한편, 니켈기반 금속 유기 골격체(Ni-MOFs-700C)를 제작하고 이를 IPMC 액추에이터에 적용한 연구도 최근 발표되었다[9]. Ni-MOFs-700C를 기반으로 제작된 액추에이터 (MESAs)는 전기적 자극뿐만 아니라 자기적 자극으로도 구동이 가능하다는 것이 특징이다. MESAs는 1.0 V 입력 신호에서 30 mm의 굽힘 변위와 1.5초의 매우 빠른 상승 시간을 보여주며, 0.1 Hz, 70 mT의 자기적 입력에선 14.5 mm의 굽힘 변위를 나타냈다. 또한, 1.0 V와 50 mT의 전기적 및 자기적 입력에서의 액추에이터의 성능을 테스트하였고, Ni-MOFs-700C의 첨가 정도에 따라 액추에이터의 전기적, 자기적 성능이 상반되어 나타난다는 것을 보여주었다.
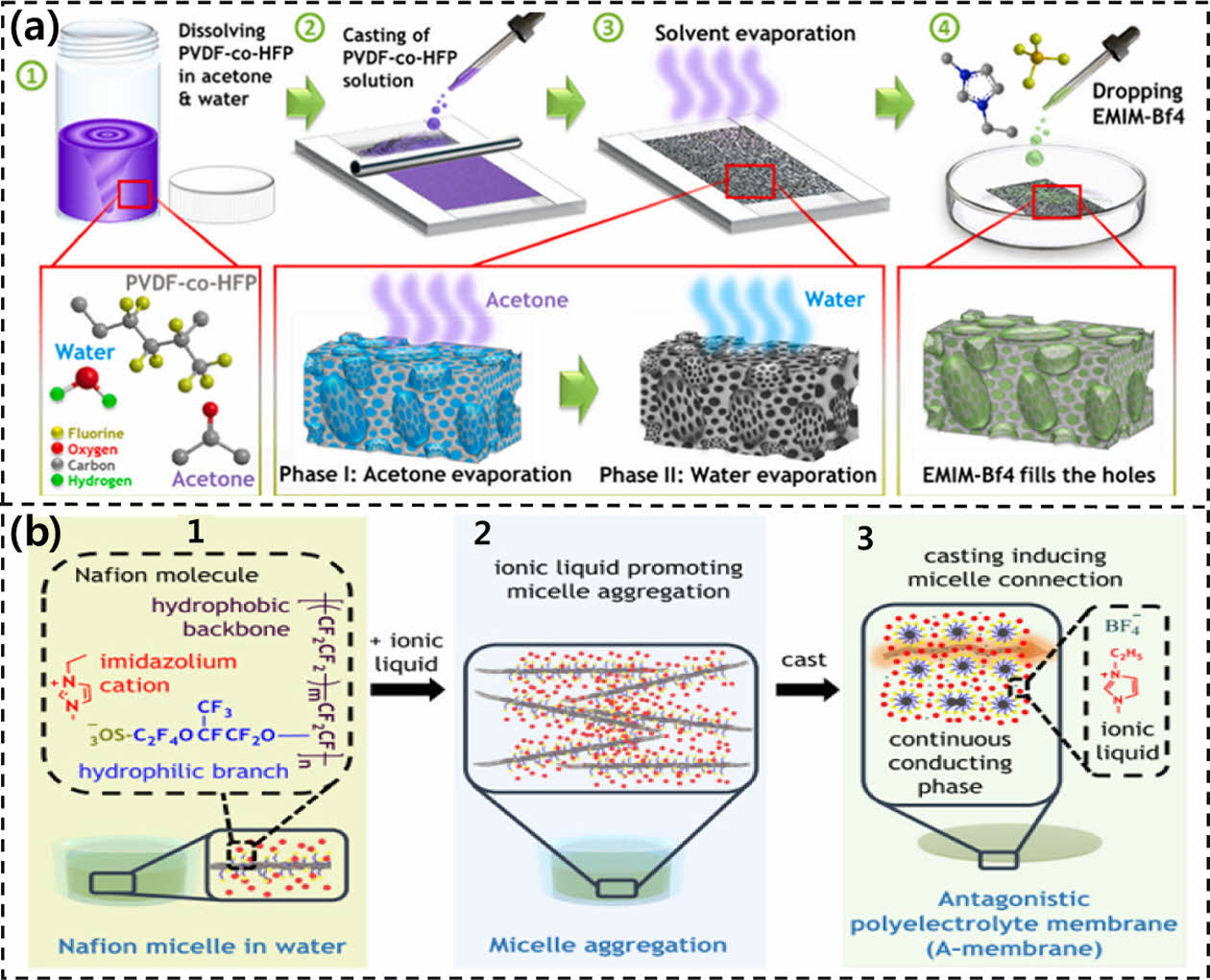
IPMC 액추에이터의 성능을 개선하는 방법 중 하나로, 고분자 전해질을 변화시키는 연구들도 발표되고 있다.전해질의 형상이나 구성 성분의 변화를 통해 IPMC 액추에이터의 성능을 향상시키거나, 전해질의 화학적 특성과 조성이 성능에 끼치는 영향을 조사하는 연구들이 주로 보고되었다. Oh et al.은 이온성 고분자에 보편적으로 사용되는 PVDF-co-HFP에 순차적 증발 과정을 적용해 이온 전도 채널을 생성하는 방법을 개발하였다[10]. 제작 방법은 Fig. 2a에 도시되어 있다. 순차적 증발 과정을 통해 제작된 전해질은 다공성의 미세 네트워크 스폰지 구조를 띄고 있으며, 이를 이온성 액체인 EMImBF4에 담구어 P60-PMNE 액추에이터를 제작했다. 폴리에틸렌(PE) 기반 액추에이터와 P60-PMNE 액추에이터의 성능을 0.5 V, 0.1 Hz의 사각파 조건에서 측정하였고, P60-PMNE 액추에이터의 굽힘 변위(25 mm)가 PE 액추에이터에 비해 약 1.5배 이상 우수함을 보여주었다.
Park et al.은 자체 결합되는 술폰화된 블록 공중합체 전해질 기반의 새로운 액추에이터를 보고했다[11]. 본 연구에서는 블록 공중합체의 술폰화도(mol %) 정도에 따라 액추에이터 성능을 측정했으며, 사각파 신호(±3 V, 0.025 Hz)에서 75 mol%이 가장 우수한 5.2 mm의 변위를 보였고, 30 mol%, 20 mol%는 상대적으로 낮은 변위를 보였다. 연구에서는 술폰화도를 결정하는 술폰산 그룹(-SO3H groups)의 양이 이온의 이동을 촉진해 액추에이터의 성능을 향상시킨 것으로 설명하였다. 또한, 전해질과 특정 이온의 상호 작용 영향이 IPMC 성능에 영향을 미치는 것을 파악하기 위한 실험도 진행하였다. 음이온을 PF6로 고정한 상태로 양이온을 EMIm와 HMIm로 각각 사용해 구동 성능을 비교하였고, HMIm 이온을 사용했을 때가 성능이 더 우수한 것으로 나타났다. 전해질의 구조적인 형상을 변화시킨 연구에서 폴리스티렌 술포네이트(PSS)와 EMIm이 결합한 PSS-EMIm과 폴리스티렌(PS)이 코어-쉘구조를 갖는 블록 공중합체 합성 방법이 발표되었다[12]. 해당 연구에서는 이온 전도성이 높은 PSS-EMIm와 기계적 안정성이 좋은 PS의 장점이 동시에 나타나는 PS-b-PSS-EMIm 전해질을 합성해 액추에이터의 성능을 높였다. 제작한 액추에이터는 낮은 구동 전압 0.5 V에서 8.2 mm 굽힘 변위와 5 s 이내의 빠른 상승 시간 그리고 14,000회 이상 작동하는 내구성과 안정성을 보였다. Fig. 2b에서는 Nafion 고분자의 양친매성을 이용해서 미셀 구조 전해질을 제작하는 방법을 도시하였다[13]. Nafion의 이온 전도성이 높은 친수성 부분을 표면으로, 이온 전도성이 좋지 않은 소수성 부분을 구조의 중심으로 향하게 한 미셀 구조로 전해질을 합성했다. 개질 된 Nafion 기반의 액추에이터는 기존의 Nafion을 그대로 사용한 액추에이터보다 같은 DC 전압에서 10배 이상의 빠른 반응 속도를 보이고 1 V, 3 Hz의 사각파 신호에서는 35배 이상의 굽힘 성능을 보였다. 0.3 V, 3.0 Hz 사인파 신호에서 개질된 Nafion 기반 액추에이터는 40일 이상 끊임없이 작동하며 내구성에도 우수함을 보였다. Park et al.은 카르복실화 셀룰로오스 나노섬유(CCNF)를 제작하고, 이것에 이온성 액체와 그래핀 나노플레이트(GN)를 첨가하여 CCNF-IL-GN이라는 새로운 고분자를 보고하였다[14]. CCNF-IL-GN을 사용한 IPMC 액추에이터는 0.1 Hz, 2.0 V 입력 신호에서 총 15.71 mm의 변위량을 보였고, 0.1~3 Hz의 대역폭에서 기존 액추에이터에 비해 위상 지연이 감소함을 보여주었다. 뿐만 아니라, CCNF-IL-GN 액추에이터는 3시간 동안의 지속적인 구동에도 98.6%의 성능을 유지하며 우수한 내구성을 보여주었다.
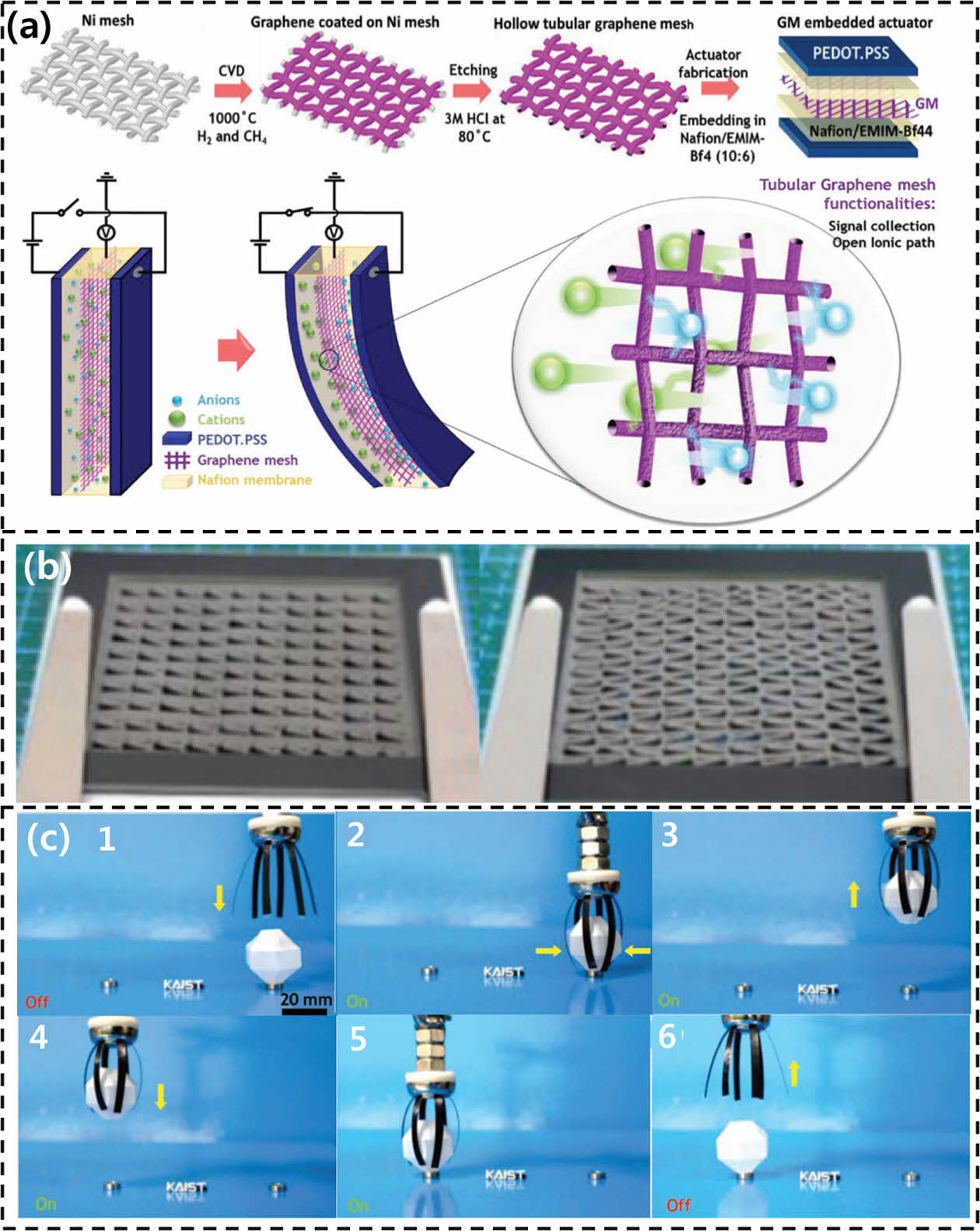
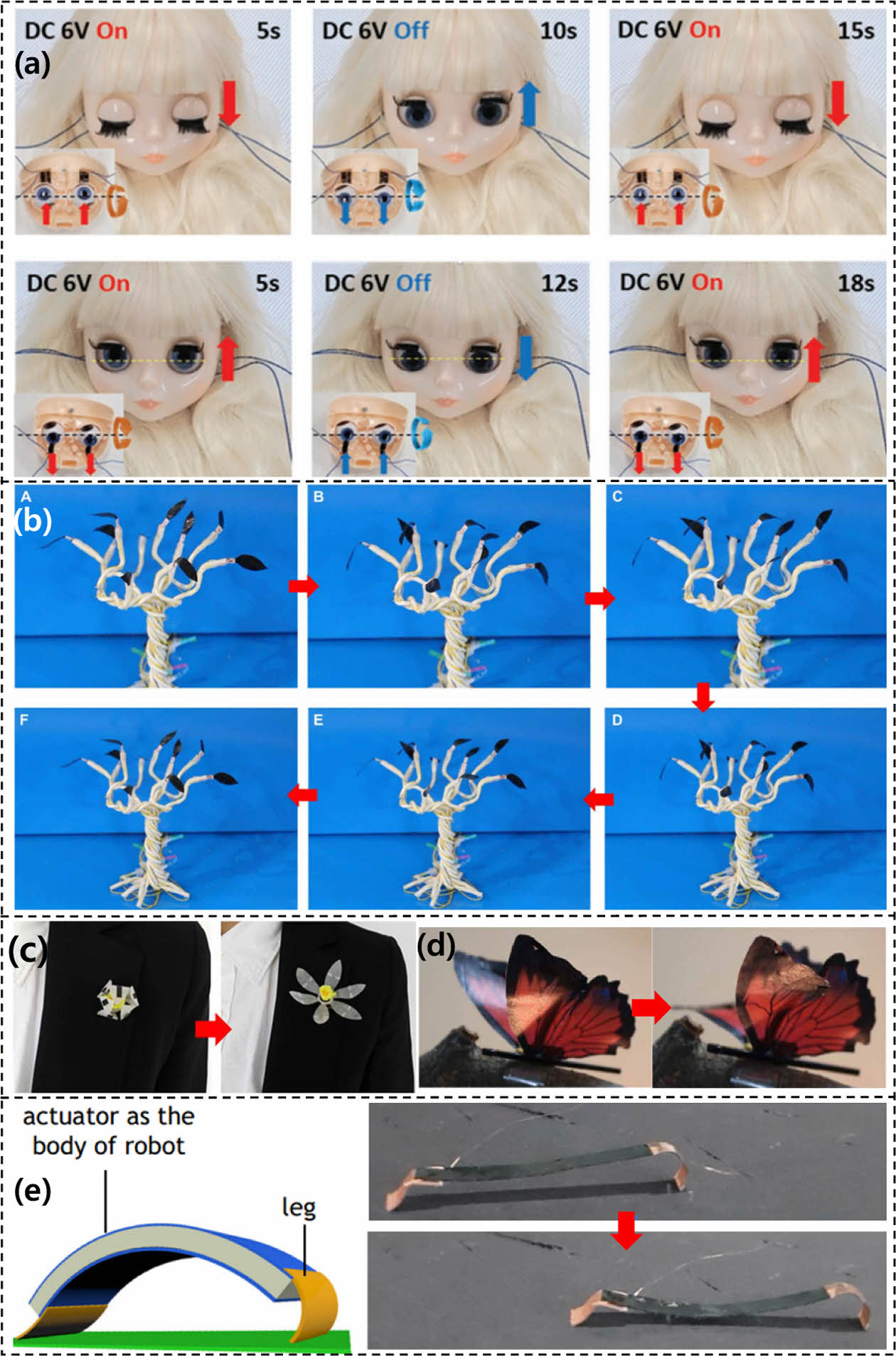
IPMC 액추에이터에 다기능성을 추가하고, 그 기능을 시연하는 연구들도 보고되고 있다. Fig. 3a에 도시된 화학기상증착(CVD) 방법을 통해, 그래핀으로 직조한 3D 메쉬(GM)를 합성하였으며 이를 IPMC의 이온성 고분자인 Nafion/EMIm-BF4의 중간에 삽입하여 굽힘 동작을 감지하는 자가-감지 IPMC 액추에이터를 제작했다[15]. 자가 감지 메커니즘은 IPMC의 양 전극에 전압을 인가하면 고분자 층 영역내에 전기장이 형성되고, 동시에 GM에도 전위차가 발생하는데 이 전위차를 측정하여 현재 위치를 식별한다. 측정값은 IPMC 굽힘 동작에 따라 변화하는데, 레이저 센서를 통해 측정한 기준 변위 값을 이용해 측정 값을 실제 값과 비슷하게 보정할 수 있다. 제작한 자가 감지 액추에이터 시스템은 매우 작은 변위(300 μm)와 구동 전압(0.1 V)에서도 자가 감지를 통한 변위 값과 레이저 측정 변위의 값이 96% 일치하는 정확도를 보여주었다. Tang et al.은 IPMC와 키리가미(kirigami) 분야를 융합해 전송 주파수(Trans-mission frequency)를 조절하는 메타표면을 제작하고 공개하였다(Fig. 3b)[16]. 메타표면은 IPMC의 표면에 레이저를 조사함으로써 쉽게 제작되었고, 레이돔(Radome), 전자기 차폐, 주파수 선택 표면 등의 분야에 응용될 잠재력을 보였다. IPMC의 뛰어난 유연성, 가벼움, 그리고 낮은 구동 전압 등의 특성은 IPMC 액추에이터가 소프트 로봇이나 인간 및 곤충의 생체 모방 기술에 적합함을 보여주며, 최근에도 IPMC 기반 로봇에 대한 연구가 지속적으로 발표되고 있다. Fig. 3c에 나타나 있듯이, IPMC는 소프트 로봇의 일종인 그리퍼 로봇 제작에 이용되었다[5]. 6개의 액추에이터로 이루어진 그리퍼 로봇은 2.5 V의 구동 전압 하에서 55 mg의 물체를 들어올릴 수 있었으며, Fig. 3c와 같이 물체의 위치를 재배치하는 모습을 보여주었다. 생체 모방 기술의 예시들은 안구 근육의 움직임(Fig. 4a), 잎들이 춤추는 나무(Fig. 4b), 수선화 꽃 로봇, 나비의 날개 짓(Fig. 4c, 4d)과 자벌레 로봇(Fig. 4e)이 있다[6,8,13].
이러한 결과들은 IPMC가 생체 모방 기술에 적합한 특성을 가지고 있음을 입증하며, 지속적인 연구와 개발을 통해 더 많은 모방 기술이 탄생할 것으로 기대된다.
2.2 전도성 고분자 액추에이터
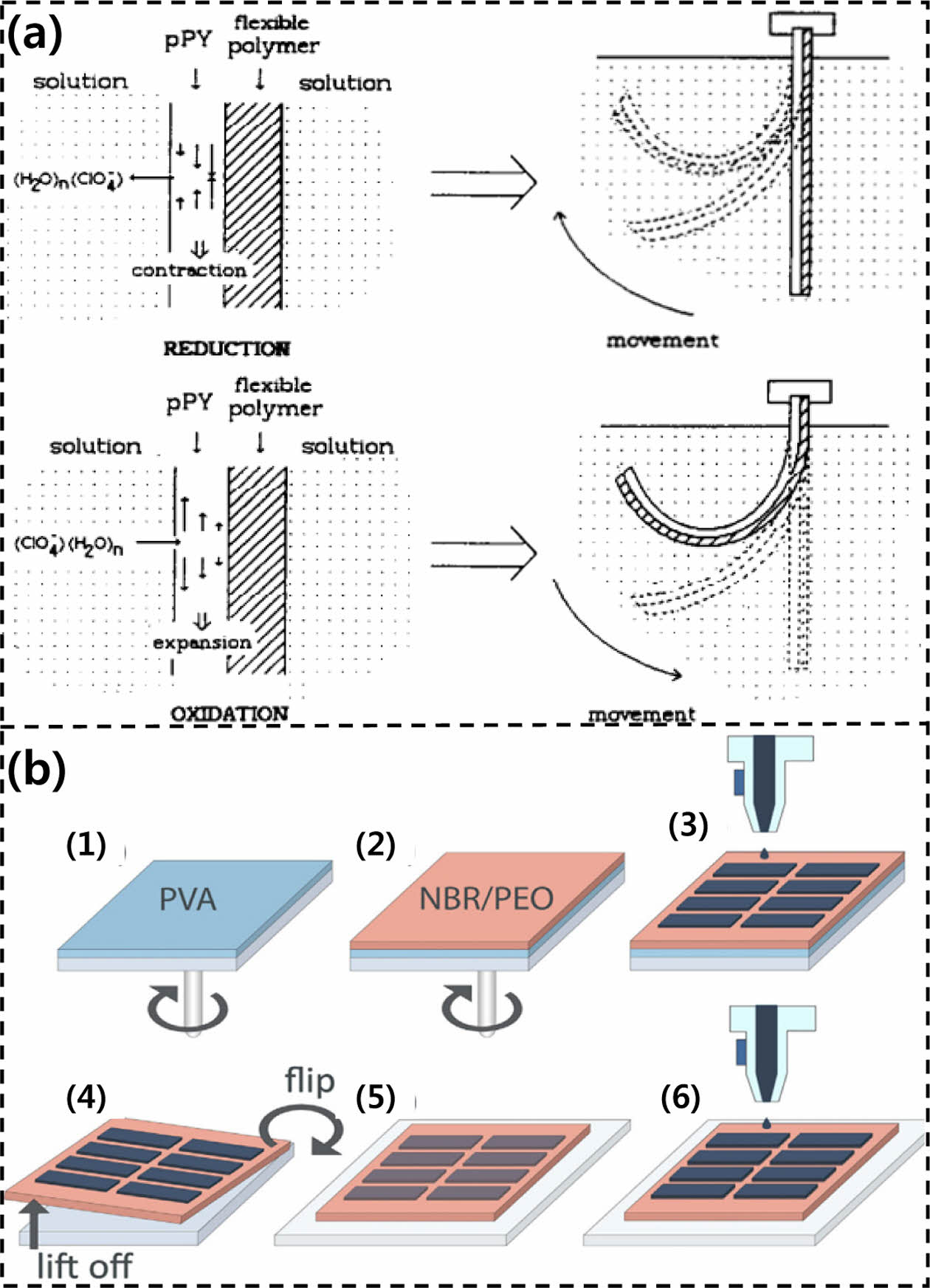
전도성 고분자(CP) 액추에이터는 전기 화학적 반응인 산화-환원에 의해 작동하는 메커니즘을 가지며, 주로 전해질 용액에서 구동하는 것이 특징이다(Fig. 5a). 최초의 CP 액추에이터는 전도성 고분자인 폴리피롤 (PPy)과 유연한 성질의 고분자가 이중층 구조를 이루며 제작되었다[17]. CP 액추에이터에 전류가 인가되면 PPy가 환원되면서 이온 입자들이 박리 되어 부피가 감소한다. 감소된 부피는 이중층 구조에 비대칭을 유발하여 굽힘 운동을 발생시킨다. 마찬가지로, 반대 방향의 전류를 인가하면 PPy에 산화 반응이 발생하고, 떨어져 나간 이온 입자들이 다시 분자 구조로 돌아와 부피가 팽창하며 본래의 형상으로 돌아가게 된다.
한편, 전도성 고분자인 PPy와 유연한 고분자인 폴리에틸렌(PE), 그리고 전해질 용액인 TsONa, LiClO4, DBS-Na를 사용한 CP 액추에이터의 성능을 비교한 연구가 보고되었다[18]. 성능 테스트결과, PPy(TsO)/PE가 가장 느린 반응 속도와 0.02 cm-1의 굽힘 변형률을 보였고, PPy(ClO4)/PE는 TsO보다 빠르지만 DBS보단 느린 반응 속도와 0.08 cm-1의 굽힘 변형률을 보였으며, PPy(DBS)/PE는 가장 빠른 반응 속도와 0.14 cm-1의 굽힘 변형률을 보였다. 논문에서는 산화-환원 반응을 위한 작업 전극(WE, Au/PE), 기준 전극(RE, Ag/AgCl), 상대 전극(CE, Pt wire)들이 사용되었다. WE는 전도성 고분자에 전기화학적 반응이 일어나도록 전류를 인가해 주는 역할을 한다. RE는 전기화학적 반응에 참가하지 않지만 전극 간의 전압을 측정하고 인가 전압을 결정하기 위해 사용한다. CE는 WE에서 이온이나 전자가 방출 또는 흡수될 때, 그와 반대되는 반응으로 전기화학적 과정이 균형을 맞추는 역할을 한다.
최근 CP에 대한 연구들은 주로 PPy나 PEDOT를 사용하며, 특히 액추에이터 성능 향상에 관한 연구들은 PPy에 새로운 물질을 첨가하거나 변형시키는 방향으로 진행되고 있다. 그 예시로 Jager et al.은 PPy와 카바이드 유래 탄소(CDC)를 결합한 연구가 보고하였다[19]. CDC는 다공성 구조와 상대적으로 낮은 전도성, 높은 강성이 특징인 소재이다. 연구에서는 CDC를 전도성이 높은 PPy와 합성하여 내구성과 수명, 정전용량이 증가한 CP 액추에이터(PPy(DBS)CDC)를 제작하고, PPy(DBS)CDC 액추에이터와 PPy 액추에이터의 성능을 비교하여 평가하였다. PPy(DBS)CDC 액추에이터는 PPy에 비해 직선 팽창과 굽힘 변형의 성능이 좋지 않았지만, 흡수된 전하 당 부피 팽창률이 1.17%로 나타나 0.6%인 PPy보다 높은 성능을 보였다. 해당 결과는 이온성 EAP의 단점인 낮은 에너지 효율을 개선했다는 점에서 의의가 있었다. 다중벽 탄소나노튜브(MWCNT)와 PPy를 합성한 연구도 보고되었는데, 특별한 WE없이 PPy-DBS-MWCNT만을 사용한다는 점이 특징이었다[20]. PPy-DBS-MWCNT는 구동 시 가역적 굽힘 운동을 보였으며, 각 변위 106°와 96.05 mC mg-1의 비전하가 소비되는 것을 측정하였다. MXene의 기계적, 화학적 장단점과 PPy의 장단점이 서로 보완된 CP 액추에이터도 공개되었다[21]. MXene은 높은 에너지 밀도와 우수한 이온 전도성 그리고 기계적 강도가 강하다는 장점이 있지만, 분자들이 층층이 쌓여 있는 구조로 인해 이온 침투를 제한한다는 점이 단점이다. 이러한 특징과 반대로, PPy는 산화-환원 반응 시 큰 부피 변화를 가지지만, 전기 전도성이 작고 기계적 강도가 작다는 장/단점을 지니고 있다. 따라서, MXene과 PPy가 결합한 Ti3C2Tx/PPy 이중층 필름은 전기 전도성과 영 계수가 기존의 PPy 필름에 비해 개선되었고, 산화-환원의 반응도 가속화되는 효과를 보였다. 결과적으로, Ti3C2Tx/PPy 액추에이터는 굽힘 변위가 기존 PPy 액추에이터에 비해 57% 개선되었으며, 10,000회의 구동 후에도 초기 구동 성능에 대해 69.2%의 성능을 유지하였다. Malmstrom et al.은 PPy와 하이드로겔(poly(N-isopropylacrylamide))을 사용한 CP 액추에이터를 연구하였다[22]. 연구에서는 PPy의 전도성을 강화하기 위한 도펀트로 도데실벤젠술폰산염(DBS), p-톨루엔술폰산나트륨(PTS), 그리고 과염소산리튬(LiClO4)을 사용한 CP를 제작하였고, 각 CP에 하이드로겔을 결합한 복합체를 제작하여 성능을 비교하였다. 성능 비교 결과, PPy-DBS CP 액추에이터가 20%의 가장 큰 변형률을 보였으며, 하이드로겔과 결합한 PPy-DBS CP는 기존 성능에 비해 2배 이상의 성능을 보였다.
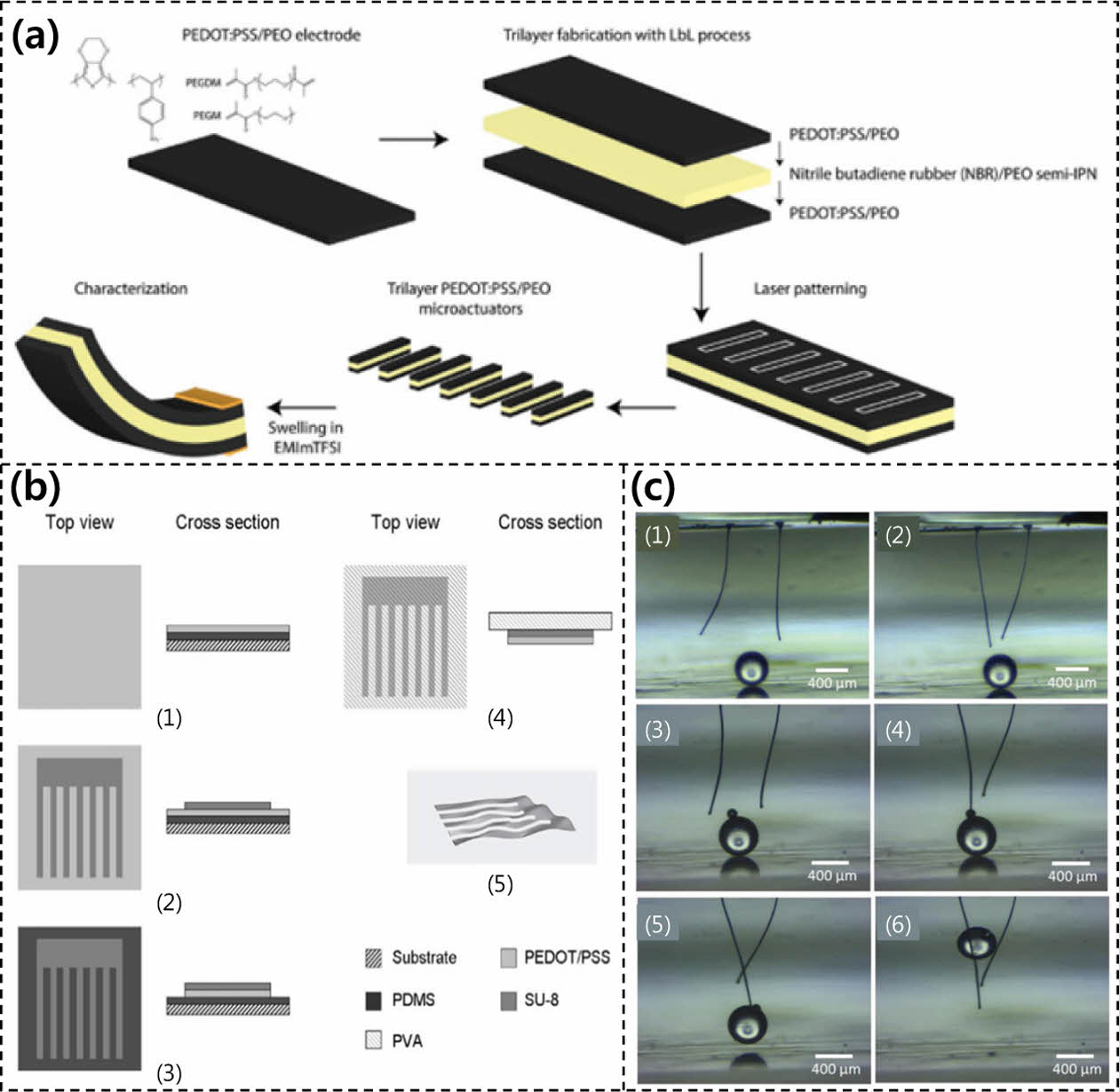
PPy를 CP로 사용한 연구와 달리, PEDOT을 활용한 연구들은 새로운 CP 액추에이터 제작 방법에 대해 발표되고 있다. PEDOT을 활용한 최초의 논문은 Inganas et al.이 발표하였다[23]. 해당 연구는 PEDOT의 전기화학적 반응으로 인한 수축, 팽창 현상이 단순히 이온의 이동으로 설명하기 어렵다고 주장하였다. 이러한 주장은 Cl-가 도핑 과정에서 PEDOT 분자 구조 내부로 침투하지만, 팽창 운동이 아닌 수축 운동이 일어난다는 점에서 비롯되었다. 논문에서는 PEDOT 분자의 수축, 팽창은 이온의 이동에서 비롯되는 것이 아니며, 전기적 상호작용에 의한 분자 구조의 변화에 의한 것이라고 주장하였다. Kiefer et al.은 PEDOT:PSS를 CP로 사용하는 잉크젯 프린팅 기술로 액추에이터를 대량 생산하는 방법을 제시하였다(Fig. 5b)[24]. Plesse et al.은 Fig. 6a에 나타나 있듯이, PEDOT:PSS 기반 삼중층 액추에이터를 층별 주조 방식으로 제작하였으며, 이를 레이저 패터닝해 마이크로 액추에이터로 제작하는 방법을 보고하였다[25]. 이와 유사하게, Jager et al.은 포토리소그래피 패터닝 공정을 통해 아주 얇지만 독립적으로 분리되어 존재할 수 있는 PEDOT:PSS 기반 마이크로 액추에이터 제작법을 제시하였다(Fig. 6b)[26]. Travas-Sejdic et al.은 마이크로 피펫을 활용하여 스스로 서있을 수 있는 PEDOT:PSS 기반 3D 액추에이터를 발표하였다[27]. 논문에서는 해당 제작 방식으로 마이크로 핀셋을 제작할 수 있었고, Fig. 6c와 같이 작동 모습을 시연하였다.
PPy 기반의 CP 액추에이터의 응용 방법도 최근 연구되었는데, Jager et al.은 원기둥형의 CP 액추에이터를 미세유체 칩에서 가변 필터로 사용하는 방법을 보고하였다[28]. 해당 응용 방법은 유체 채널에서 특정 크기의 미세 입자들을 필터링하는데 적합하며, 외부 자극을 통해 채널의 크기를 사용자가 정의할 수 있어 PPy기반 CP 액추에이터의 활용법을 새롭게 제시하였다.
한편, PPy나 PEDOT과 같은 전도성 고분자들의 전반적인 성능을 비교하는 연구도 보고되었다. Tamm et al.은 PPy, PEDOT, PEDOT-PPy 기반의 삼중층 CP 액추에이터의 성능을 조사하였다[29]. 논문에서 주목할 점은 액추에이터 제작 시 적용하는 PPy와 PEDOT의 화학적, 전기화학적 합성법과 CP의 구조에 따라 액추에이터의 성능이 달라졌다는 것이다. 해당 연구에서 CP들의 화학적 및 전기화학적 합성에 대한 액추에이터 성능 결과가 명료하게 정리되어 있지는 않았지만, 필요한 성능 기준에 근접하는 액추에이터를 선택하는 데 유용한 정보를 제공하였다. 또한, CP의 구조에 대한 성능 결과는 PEDOT(기판)/PPy 구조의 경우 더 빠른 반응 속도와 전반적인 응답이 좋아졌고, 반면에 PPy(기판)/PEDOT 구조는 빠른 반응 속도와 함께 PPy에 크리프가 발생하는 경향을 줄인다는 것을 보고하였다. 추가적으로, 논문은 두 가지의 이온성 액체를 사용함으로써, 고분자와 비슷한 반경의 이온을 갖는 이온성 액체는 액추에이터의 성능을 저하한다는 것을 발견하였다. 이와 유사하게, Innis et al.은 PPy, PEDOT 그리고 PProDOT(Hx)2에 대한 화학적, 전기화학적 합성법이 이중층 CP 액추에이터의 성능에 끼치는 영향을 평가하였다[30]. 결과적으로, 전기화학적으로 합성된 이중층 CP 액추에이터가 동일한 전압 하에서 화학적으로 합성된 액추에이터에 비해 훨씬 큰 변위를 나타냈다. CP의 종류에 의한 성능 평가에서는 PPy 액추에이터가 PProDOT와 PEDOT에 비해 더 큰 변위를 보였다. 또한, 사용되는 전해질의 종류에 따라 액추에이터의 성능과 굽힘 운동의 방향이 달라지는 것을 발견하였다. 이러한 현상은 CP의 합성 과정에 사용한 전해질의 성분에 따라 구동 특성에도 영향을 끼치는 것으로 설명되었다.
|
Fig. 1 (a) Synthesis of Th-SNG molecular structure. Reproduced with permission from Ref. [4]. Copyright 2016, Wiley-VCH (b) Synthesis of boron and sulfur-doped Covalent Organic Frameworks(COFs). Reproduced with permission from Ref. [5]. Copyright 2019, Wiley-VCH (c) MXene molecular structure and the combined molecular structure of PEDOT:PSS and MXene. Reproduced with permission from Ref. [6]. Copyright 2019, American Association for the Advancement of Science (d) Synthesis of MXenebased Metal Organic Frameworks(MOFs). Reproduced with permission from Ref. [8]. Copyright 2023, Wiley-VCH |
|
Fig. 2 (a) Fabrication using the two-phase evaporation technique and the porous micro-network structure. Reproduced with permission from Ref. [10]. Copyright 2022, Elsevier (b) Antagonistic solvent procedure and amphiphilic Nafion molecules to assemble into micelles with ionic surfaces enclosing non-conducting cores. Reproduced with permission from Ref. [13]. Copyright 2024, Nature Publishing Group |
|
Fig. 3 (a) Synthesis of graphene mesh electrode by CVD technology and sensing mechanism of actuator using embedded graphene mesh electrode. Reproduced with permission from Ref. [15]. Copyright 2019, Wiley-VCH (b) Image of the fabricated IPMC kirigami metasurface. Reproduced with permission from Ref. [16]. Copyright 2024, Wiley-VCH (c) Operation of grapple robot consisting of six symmetric ionic actuators based on BS-COF-C/ P.P. Reproduced with permission from Ref. [5]. Copyright 2019, Wiley-VCH |
|
Fig. 4 (a) Demonstration of artificial human robot’s eye. Reproduced with permission from Ref. [8]. Copyright 2023, Wiley-VCH (b), (c), (d) Demonstration of a tree with dancing leaves, origami-inspired narcissus flower robot and dancing butterflies on a tree. Reproduced with permission from Ref. [6]. Copyright 2019, American Association for the Advancement of Science (e) An inchwormmimetic soft robot and locomotion of inchworm robot. Reproduced with permission from Ref. [13]. Copyright 2024, Nature Publishing Group |
|
Fig. 5 (a) Scheme of actuator operation using bilayer formed by PPy and a flexible film, left is reduction process and right is oxidation process. Reproduced with permission from Ref. [17]. Copyright 1992, Elsevier (b) Scheme of the fabrication process based on PEDOT:PSS using ink-jet printing technology. Reproduced with permission from Ref. [24]. Copyright 2018, Elsevier |
|
Fig. 6 (a) PEDOT:PSS/PEO microactuator fabrication with LbL process. Reproduced with permission from Ref. [25]. Copyright 2019, Wiley-VCH (b) Free-standing PEDOT:PSS/ SU8 microactuator fabrication with photolithographic patterning. Reproduced with permission from Ref. [26]. Copyright 2013, IOP Publishing (c) Micro tweezer made from micropipette. Reproduced with permission from Ref. [27]. Copyright 2022, Wiley-VCH |
3.1 유전성 탄성체 액추에이터
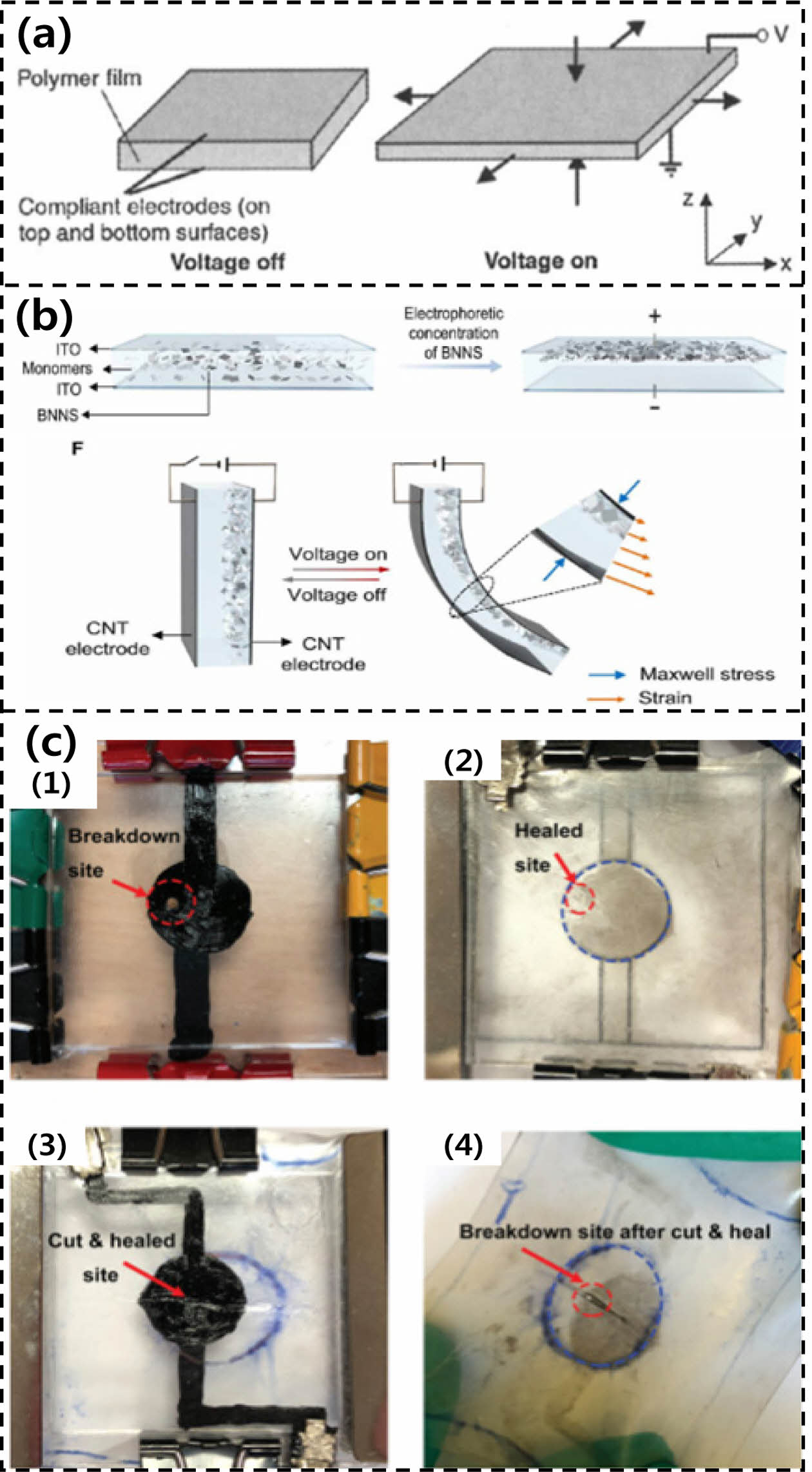
DEA는 유전성 탄성체의 양쪽 표면에 팽창과 수축이 가능한 유연한 전극을 부착한 구조의 액추에이터이다. DEA의 구동 원리는 Fig. 7a와 같이 양 전극에 전압을 인가하고, 두 전극 사이에 발생하는 전기적 인력에 의해 DE가 눌리며 두께가 줄어드는 동시에 면적 방향으로 팽창되는 원리이다[31]. DEA는 구동 시 큰 변형을 나타내기 때문에, DEA의 구동 동안 안정적으로 전압을 인가할 수 있는 유연한 전극이 필수적이다. 따라서, 유연한 전극을 확보하기 위해 전극 후보 고분자인 PEDOT:PSS에 가소제 역할을 하는 자일리톨(Xylitol)을 첨가하는 등의 연구가 수행되었다[32]. DEA는 큰 변형률 뿐만 아니라, 높은 에너지 밀도, 경량성, 유연성 그리고 제작 과정이 간편하다는 장점이 있다. DEA의 연구들은 주로 전극 및 DE로 사용되는 물질의 특성들을 분석하고, 새로운 기능을 추가하는 방법들을 시도하거나, DEA의 다양한 적용 방안을 발표하고 있다. 또한, DEA의 성능을 높이기 위한 연구들도 꾸준히 발표되고 있다.
초기의 DEA의 DE는 실리콘, 아크릴 기반 재료(VHB 4910) 등이 사용되었고, 전극은 카본 그리스를 사용하였다[31]. DEA는 우수한 구동 성능을 나타내기 위해 사전 변형 과정이 필수적으로 요구되며, 고전압에서 작동되기 때문에 전기적 인력에 의한 절연 파괴가 발생할 수 있다. DEA는 제작이 간편하고 구조가 단순하기 때문에 Fig. 7a와 같은 기본 구조 외에도 유니모르프, 바이모르프, 롤, 다이어프램 구조 등이 기본적으로 활용되고 있다[33].
DEA의 성능을 개선하기 위한 방법으로는 DE로 사용되는 고분자들을 서로 합성하거나 변형하는 연구들이 주로 보고되었다. Pei et al.은 VHB 4910를 4배의 면적으로 사전 변형한 후, 1,6-헥산다이올 디아크릴레이트(HDDA) 또는 트리메틸올프로판 트리메틸-아크릴레이트(TMPTMA)를 첨가하여 상호침투형 고분자 네트워크(IPNs) 구조를 가진 DE를 제작하였다[34]. VHB에는 사전 변형에 의해서 내부 인장력이 발생한 상태이지만, 침투한 HDDA나 TMPTMA는 VHB의 복원력에 의해서 압축력이 가해지고 있는 상태가 된다. IPN 구조는 이 두 가지의 반발력이 균형을 잡으며 형성되게 된다. 논문에서는 HDDA나 TMPTMA의 첨가량이 증가하면 DE의 강성이 증가해 액추에이터의 성능이 감소할 것으로 예상하였다. 하지만, HDDA(18.33%)보다 강성이 더욱 크게 측정되었던 TMPTMA(9.7%)는 더 큰 변형률(TMPTMA-300%, HDDA-233%)을 보여주었다. 또한, 절연 파괴 측정에서도 TMPTMA가 HDDA 뿐만 아니라 기존의 DE 보다도 더 큰 절연 파괴 강도(420 MV m-1)를 보였다. Dang et al.은 적절한 가교제(crosslinking agent), 단랑체(monomer), 올리고머를 사용해 가교망 구조(crosslinked network structure)의 아크릴 탄성체를 제작했다[35]. 가교망 구조의 효과는 유전성 탄성체의 기계적 강도와 강인성을 증가시켰으며, 유전 계수를 향상시켰다. 이러한 구조를 통해 제작된 액추에이터는 70 MV m-1하에서 118%의 큰 변형률, 높은 에너지 밀도(0.24 MJ m-3)와 빠른 반응을 보였다. 이와 비슷하게, Pei et al.은 우레탄 디아크릴레이트(CN9021) 수지와 프로폭실화 네오펜틸글리콜 아크릴레이트(PNPDA) 단랑체를 사용하여 바이모달 네트워크 구조를 가진 DE(PHDE)를 제작하고 발표하였다[36]. 개발된 PHDE의 성능은 가교제의 첨가 비율과 수소 결합 비율을 조정함으로써 전기 기계적 특성을 결정할 수 있었다. PHDE 기반 액추에이터는 사전 변형 과정 없이도 최대 190%의 면적 변형률을 보였으며, 3.5 kV, 2 Hz의 사각파 신호에서 110% 이상의 변형률을 유지하는 성능을 보였다.
한편, DE의 분자 구조를 변형하는 앞선 연구들과 달리, DE에 물리적으로 물질을 첨가해 DEA 성능을 개선하는 연구도 보고되었다[37]. 성능 개선 과정의 첫 번째 단계로, 붕화 질소 나노시트(BNN)를 전구 물질(DE)에 넣어 콜로이드 현탁액을 생성한다. 두 번째로는 콜로이드 현탁액을 평행한 두 전극사이에 주입 후 DC 전압을 인가한다. 마지막으로, 생성된 전기장에 의해 음전하를 띄는 BNN이 한 방향으로 치우치게 되면 자외선을 사용해 이것을 경화시킨다. 이러한 과정을 통해, 연구에서는 유니모르프 나노 복합 유전성 탄성체(UNDE)와 UNDE기반 액추에이터를 제작하였다(Fig. 7b). 물리적으로 결합된 BNN은 DE의 이방성 강성을 증가시켰고, 이방성 강성은 액추에이터에 비대칭 팽창을 유발하여 굽힘 운동을 발생시켰다. 또한, 와이블분포(Weibull distribution) 분석을 통하여 논문의 제작 방식이 DE의 절연 파괴 강도를 점차적으로 개선하였음을 보였다.
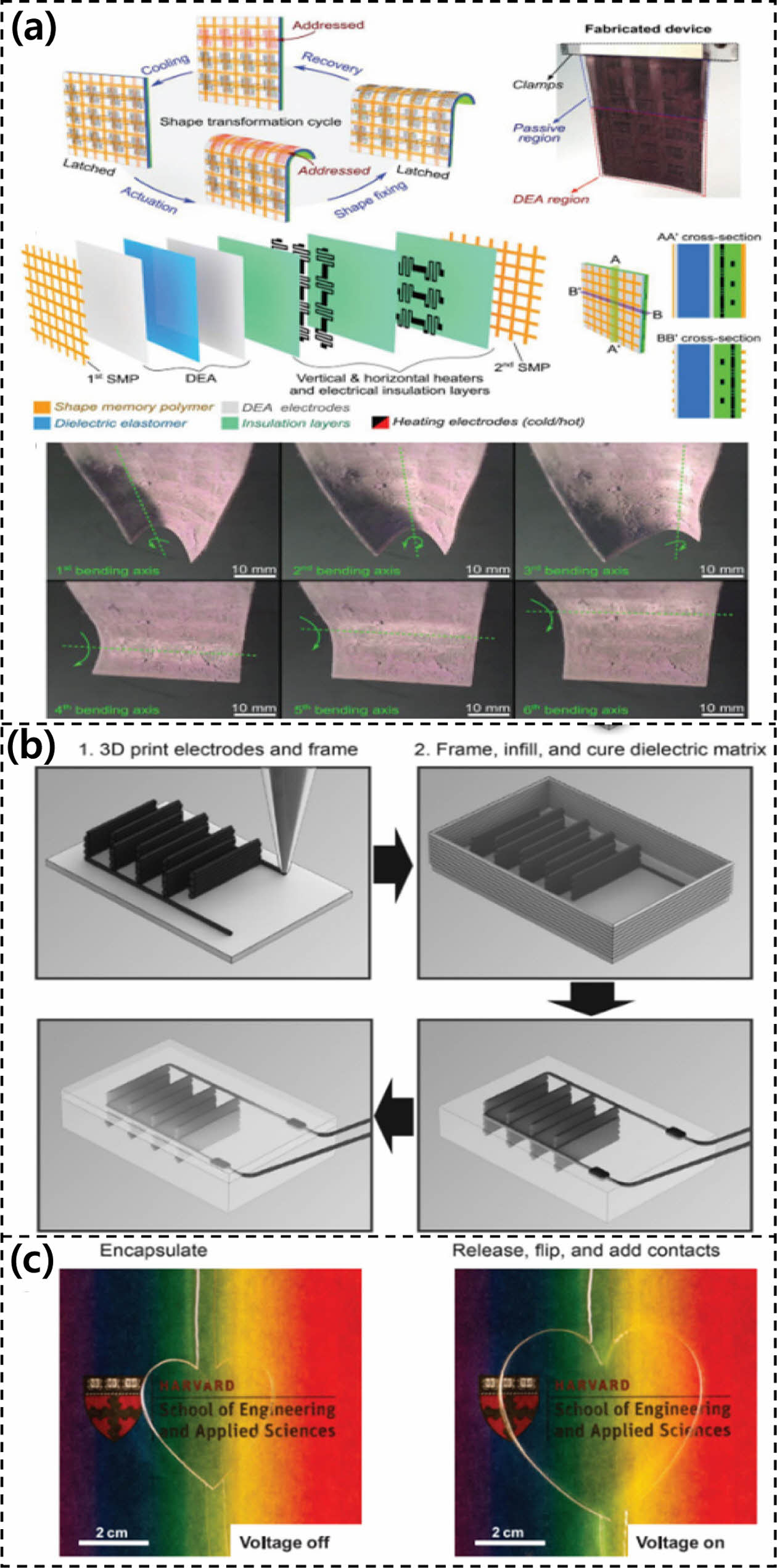
DEA에 새로운 기능을 추가하는 연구는 다양한 분야의 기술과 융합하여 제시되고 있다. Wan et al.은 메틸티오글리코레이트로 개질된 열가소성 스티렌 부타디엔 스티렌(thermoplastic methyl thioglycolate-modified styrene-butadiene-styrene, MGSBS) 탄성체를 이용해 최초로 자가 치유 기능을 가진 DEA를 소개하였다(Fig. 7c)[38]. MGSBS기반 DEA는 절연 파괴에 의한 손상뿐만 아니라 기계적 손상에도 자가 치유가 가능하였고, 이러한 사실은 소프트 로봇, 액추에이터 등의 응용 분야에서 새로운 활용 가능성을 제시했다. MGSBS DEA는 절연 파괴 후에 절연 강도가 최대 67%까지 회복되었으며, 기계적 손상 후에는 구동 성능 저하 없이 절연 강도가 39%까지 회복되는 것을 보여주었다. Shea et al.은 형상 기억 고분자(SMP)를 활용해 여러 방향으로 굽힘 구동이 가능한 DEA를 제작하였다[39]. 논문의 DEA 구조는 네 가지의 소재로 이루어져 있었고, 해당 소재들은 SMP, DE, 전극, 신축성 히터로 이루어져 있었다. 2개의 SMP와 1개의 DEA를 사용한 구조는 이축(수직, 수평 축)을 기준으로 굽힘 운동이 가능하고(Fig. 8a), 2개의 DEA와 1개의 SMP를 사용한 구조는 한 축을 기준으로만 굽힘 구동이 가능하지만 앞, 뒤 방향으로 굽힘 구동이 가능하였다. 또한, 논문에서는 제안한 DEA 구조들을 통해 수직, 수평 축을 기준으로 작동하는 그리퍼 메커니즘을 제안하였다. Lewis et al.은 3D 프린트 기술과 결합한 DEA 제조 방법을 보고하였다(Fig. 8b)[40]. 제작된 3D DEA는 기존의 DEA와 다르게 두께 방향으로의 수축이 아닌, 면적의 한 방향이 수축하고 다른 방향은 팽창한다는 점에서 차이점이 있었다. 3D 프린팅 기술은 다양한 형상의 DEA를 제작할 수 있게 만들었고, 본 논문에서는 매우 얇은 크기(0.15×7.5×3.9 cm3)의 DEA, 직교 작동 방향을 갖춘 다중 복셀 DEA, 사전 변형이 없는 회전 DEA를 제시하였다.
한편, 투명한 성질을 갖는 전극을 이용해 투명한 DEA를 제작하는 연구들도 발표되었다. Nam et al.은 DEA에 얇은 두께의 그래핀(FLG)을 전극으로 사용해 투명한 DEA를 제작하였다[41]. FLG-DEA는 400~660 nm 파장 영역에서 50% 이상의 투과율을 보이며 DEA가 렌즈나 광전자 기계 장치 등의 분야에 적용될 가능성을 보여주었다. Suo et al.은 투명 전극으로 하이드로겔을 사용해 Fig. 8c와 같이 투명한 DEA를 발표하였다[42]. 논문에서는 전극-전해질-유전체-전극 층 구조에서 양 전극에 전압을 인가하면, 유전체의 큰 전기 저항에 대부분의 전압이 걸려, 전해질 내부에 유전체로 인한 두 개의 전기적 층이 생기는 원리를 통해 투명한 DEA를 제작하였다. 투명 전극으로 사용된 하이드로겔은 가시광선 영역(400-700 nm)에서 98.9%의 평균 투과율을 보였으며, 다른 투명한 전극들에 비해서도 가장 낮은 전기 저항도를 가지며 높은 성능을 보였다.
DEA는 제작 과정이 매우 간편하여 다양한 형태와 크기로 제작하는데 유리하다. 따라서 DEA는 소프트 로봇, 인공 근육, 햅틱 및 피드백 장치, 광학 장치 등의 분야에서 적극적으로 활용되고 있다. C. Jordi et al.은 DEA의 크기가 액추에이터 성능에 끼치는 영향을 평가하였고, 0.95×0.74 m2 면적의 DEA를 통해 하늘에서 작동하는 비행선 물고기 로봇을 제작하였다[43]. 연구를 통해, DEA의 크기는 성능 개선에 영향을 끼치지 않는다는 것을 밝혔다. Carlo et al.은 DEA의 기계적 작동 메커니즘을 활용해 기능성 미세유체 채널을 제작하였다[44]. 미세유체 채널은 실리콘 탄성체인 PDMS를 사용해 제작되었고, 그 윗면에 DEA를 붙인 구조로 제작하여 기능성 미세유체 채널을 완성하였다. 미세유체 채널의 통로가 막혔을 때, 부착된 DEA는 물리적으로 통로를 확장하여 채널의 기능 고장을 막는 역할을 수행하였다. J. Loverich et al.은 DEA를 활용해 마이크로 펌프를 제작하고 성능을 테스트하였다[45]. 마이크로 펌프에 적용된 DEA는 다이어프램 DEA 구조와 비슷한 풍선 형태를 사용하였다. Pei et al.은 롤 구조의 DEA를 활용한 워킹 로봇과 스시 로봇을 제작하였다[46]. 논문에서는 원주 방향으로 DEA를 적층하여 롤 구조 DEA가 굽힘 운동이 가능한 메커니즘을 갖고 있다고 설명하였다. Cho et al.은 DEA를 측면 방향으로 적층하는 방법을 고안하여 피부 장착형 진동촉각 자극기를 제작하였다[47]. 해당 방법은 SU-8 기반의 포토리소그래피 공정과 금의 스퍼터링 증착, PDMS와 이온성 액체기반 유전체의 스핀 코팅, 기판 식각 과정으로 이뤄져 있으며, 이를 통해 제작된 측면 적층 DEA(LMDEA)는 촉각 보조 장치, 촉각 통신, 햅틱 기술의 피드백 장치 등의 분야에서 DEA의 우수한 가능성을 제시하였다.
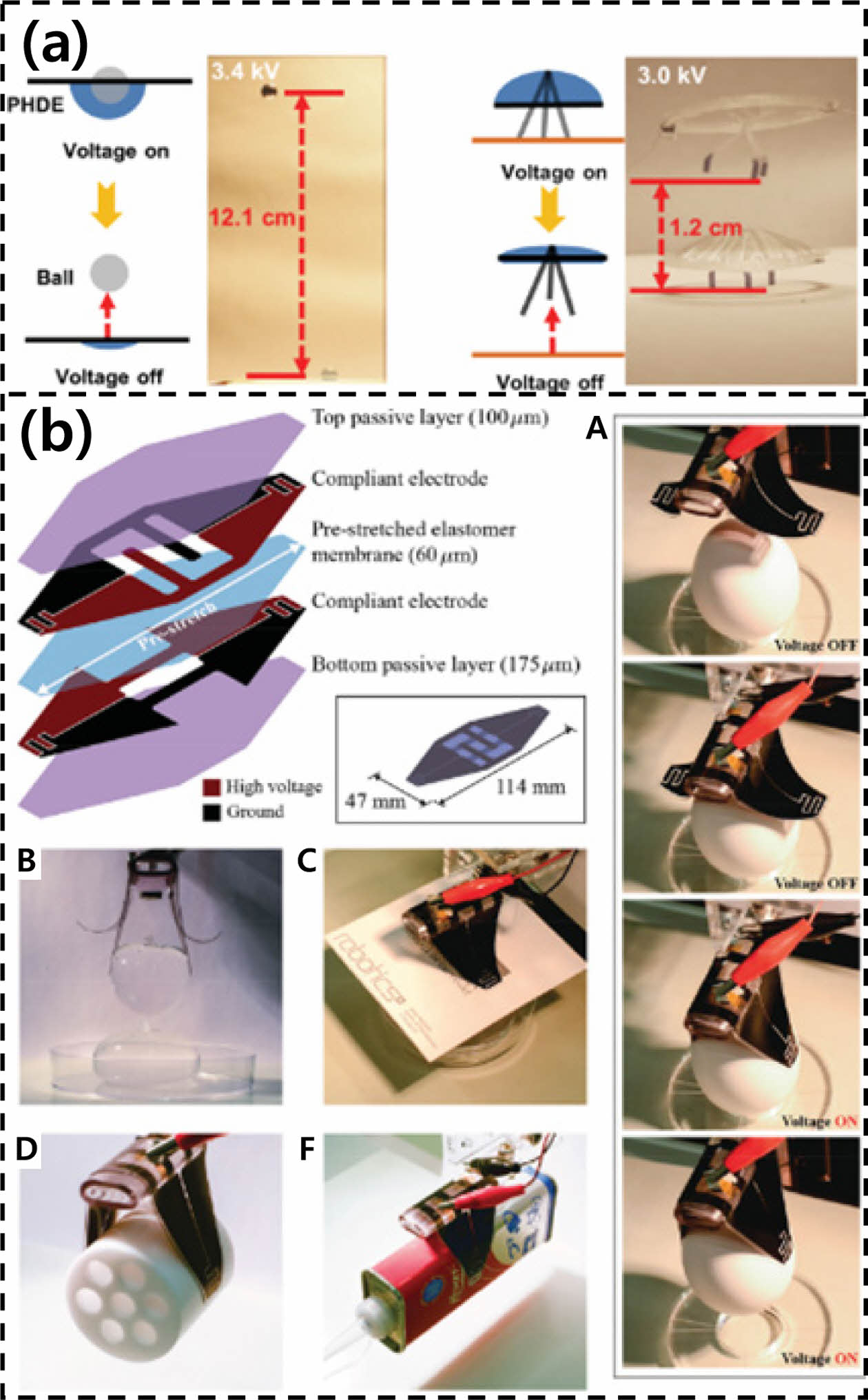
비교적 최근 연구에서는 DEA의 구동 메커니즘을 더욱 새로운 분야에 적용하려는 사례들이 보고되었다. 첫번째 예시로, DEA는 세포배양장치에 기계적 자극을 전달하기 위한 동적 요소로 활용되었다[48]. 연구에서는 3D 프린팅으로 금형을 제작하고, 이를 이용해 PDMS로 세포배양창지 구조를 제작하였으며, 내부에 DEA를 삽입하여 전기적 신호에 의해 기계적 자극을 전달할 수 있는 세포배양장치를 제작하였다. 폴리아크릴레이트 DE를 활용한 DEA는 비자성 모터로 제작될 수 있었으며, 제작된 모터의 성능을 측정한 연구가 발표되었다[35]. 비자성 모터는 기존 VHB 4910로 제작한 비자성 모터보다 15배 빠른 회전속도를 보였다. Fig. 9a에는 이중 모드 네트워크 구조로 제작된 PHDE 액추에이터를 사용해 공을 띄우는 모습(왼쪽)과 점프 로봇(오른쪽)을 시연한 사진이다[36]. 해당 논문에서는 Fig. 9a의 제작품 외에도 200 g의 무게추를 들어올리는 액추에이터와 롤(roll) 액추에이터, 롤 펌프 등의 기계를 제작하고 시연하였다. Shea et al.은 Fig. 9b에 나타나 있듯이 서로 맞물려 있는 모양의 전극으로 전기 접착 기능이 있는 DEA 기반 그리퍼 로봇를 발표하였다[49]. DEA 양 전극위에 두께가 서로 다른 실리콘 층(100 μm, 175 μm)을 쌓으면, 구동 시 실리콘 층의 두께 차이로 인해 굽힘 변형이 발생하고, 이로 인해 그리퍼가 물체를 잡도록 만든다. 또한, 서로 맞물려 있는 전극 구조는 전압이 인가될 때 전기장을 형성하여 전기 접착을 발생한다. 논문에서, 전기 접착 효과는 평평한 물건이나 가변형 물체를 잡을 수 있도록 하고, 자가감지 기능도 수행할 수 있다고 발표하였다.
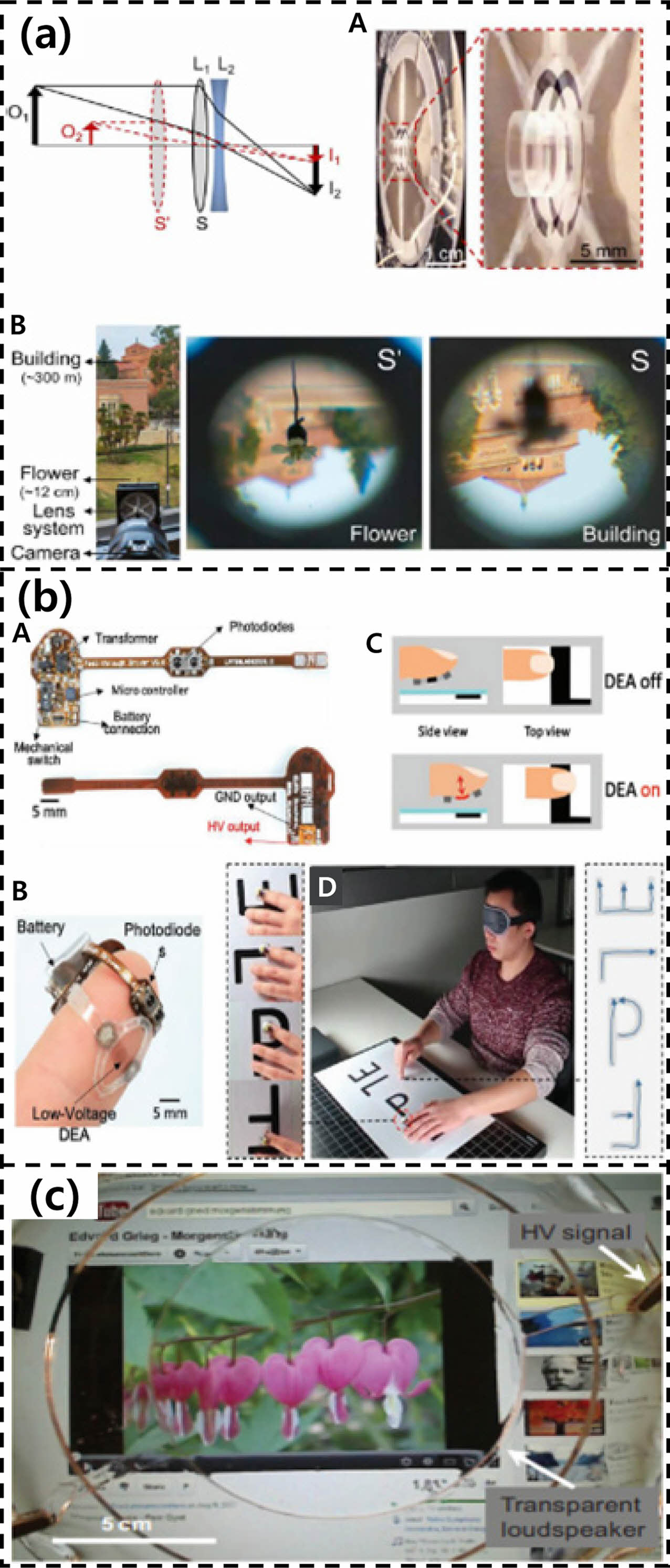
유니모르프 나노 복합 유전성 탄성체기반 디스크 형상 선형 액추에이터는 초점 거리를 40배까지 변화시킬 수 있는 고속 렌즈의 모터로 활용되었다(Fig. 10a)[37]. 논문에서는 디스크 형상 선형 액추에이터가 로봇 시스템용 소형 작동 장치를 제작하는데 도움이 될 것으로 발표하였다. 같은 팀에서는 낮은 구동 전압을 갖는 18 μm 두께의 DEA(FT-DEA)를 활용해 액추에이터의 구동 신호를 피부에 전달하는 햅틱 기기를 제작하였다(Fig. 10b)[50].
FT-DEA는 대부분의 DEA 구동 전압 보다 낮은 구동 전압인 450 V에서도 25% 변형률을 보였는데, 논문에서는 이것이 DE의 두께가 매우 얇기 때문에 가능한 것으로 설명하였다. FT-DEA로 제작한 소형 햅틱 기기는 1 Hz에서 500 Hz 범위까지 물리적 신호를 손끝에 전달할 수 있었으며, 피실험자들은 73~97% 범위의 정확도로 햅틱에서 발생하는 신호를 구별할 수 있었다. 이온 전도체인 하이드로겔 기반의 투명한 DEA를 활용한 전체 가청 범위에서 소리를 생성하는 투명한 스피커가 제작되었다(Fig. 10c)[42]. 이것은 투명한 DEA가 기본 공진을 훨씬 뛰어넘는 주파수 범위에서도 전기적 신호를 기계적 신호로 변환할 수 있다는 것을 보여주었다. He et al.은 3D 프린팅 기술을 활용한 DEA 제작 방식을 통해 곤충 크기의 소프트 로봇을 제작하였다[51]. 해당 연구에서 사용된 3D 프린터는 분리된 노즐을 이용하여 3개의 층으로 이루어진 원기둥 형상의 DEA를 간편하게 제작할 수 있었다. 제작된 소프트 로봇은 몸길이 15 mm에 질량 450 mg으로 매우 작고 가벼우며, 760 Hz, 9 kV 신호에서 초당 60 mm 속도의 성능을 보여주었다. 또한, 이 로봇은 유리, 알루미늄, 모래, 종이, 나무 등 다양한 지면 환경과 경사진 경로, 제한된 경로에서 구동할 뿐만 아니라 군집 작업도 가능하였다.
3.2 강유전 고분자 액추에이터
강유전체(Ferroelectrics)는 외부의 전기장 없이 스스로 분극 상태를 유지하며, 외부 전기장에 의해 분극의 방향을 바꿀 수 있다는 특징을 가지고 있다. 강유전체는 대부분 압전 효과(Piezoelectric effect)를 가지고 있어, 이를 이용한 압전 고분자 액추에이터에 대한 연구들이 지속적으로 발표되고 있다.
Kawai는 플루오르화 폴리비닐라덴(PVDF)이 압전 효과를 가지는 것을 최초로 발견하였으며, 이를 위해 특정한 기계적, 온도처리 과정이 필요하였다[52]. 동일한 처리 과정을 통해 불화 비닐 수지(PVF), 폴리염화 비닐(PVC)에 큰 압전기(piezoelectricity)를 측정하였으며, 폴리카보네이트(PC), 폴리에틸렌(PE), 폴리테트라플루오로에틸렌(PTFE)에도 작고, 시간에 따라 감소하는 압전기가 측정되었다. Zhang et al.은 압전 고분자 필름인 P(VDF-TrFE)에 전자선 조사를 가함으로써 기존 분극 구조를 무너뜨리고 릴렉서 강유전체(Relaxor Ferroelectric)를 제작하였다[53]. 릴렉서 강유전체는 온도와 주파수에 따라 유전성이 달라지는 것이 특징이며, 논문에서는 전자선을 조사한 P(VDF-TrFE)가 릴렉서 강유전체의 성질을 동일하게 나타나는 것을 보고하였다.
제작 방식의 개선을 통해 압전 고분자 액추에이터를 다른 분야에 적용하려는 연구도 발표되었다. Pabst et al.은 잉크젯 인쇄 기술을 통한 압전 액추에이터 제작 방식을 발표하였다[54]. 이를 통해 제작한 액추에이터는 원기둥형 및 외팔보 형태로 제작되었으며, 각각의 형태에 대해 주파수-굴절 응답과 공진 주파수를 측정하였다. 논문에서는 잉크젯 인쇄 기술을 활용한 액추에이터 제작 방식이 미세유체학에 기반한 랩온어칩(LOC) 분야에도 활용할 수 있다고 설명하였다.
최근에는 압전 고분자 액추에이터의 성능을 개선하기 위한 연구들이 발표되고 있다. Zhang et al.은 불소화 알킨(FA)을 릴렉서 강유전체인 PVDF-TrFE-CFE에 사용하여 분극 변화를 향상시키고 전기-기계적 결합을 강화하였다[55]. 논문에서는 PVDF-TrFE-CFE의 FA의 비율에 따른 유전 상수 값과 분극 정도를 측정하였다. 측정 결과, 1.9 mol%의 FA가 첨가된 PVDF-TrFE-CFE는 40 MV/m 에서 전기 기계적 결합 정도값이 88%, 유전 상수값이 1050 pm/V를 나타내며 에너지 수확, 소프트 로봇, 웨어러블 장치 등의 분야에 적합한 성능을 보여주었다. Sekine et al.은 PVDF-TrFE와 SWCNT 복합물을 활성 층으로 사용하고, PEDOT:PSS와 산화 그래핀(GO) 복합물을 전극으로 사용한 압전 고분자 액추에이터를 발표하였다[56]. 논문에서는 PVDF-TrFE와 SWCNT의 분극 정도가 PVDF-TrFE에 비해 증가함을 보였고, 굽힘 구동 변위, 주파수 응답 성능이 개선됨을 확인하였다. 또한, 제작된 액추에이터는 손가락에 기계적 신호를 전달하는 역할을 수행할 수 있음을 보여 햅틱 분야에 적용 가능성을 제시하였다.
3.3 유압증폭 자가치유 정전 액추에이터
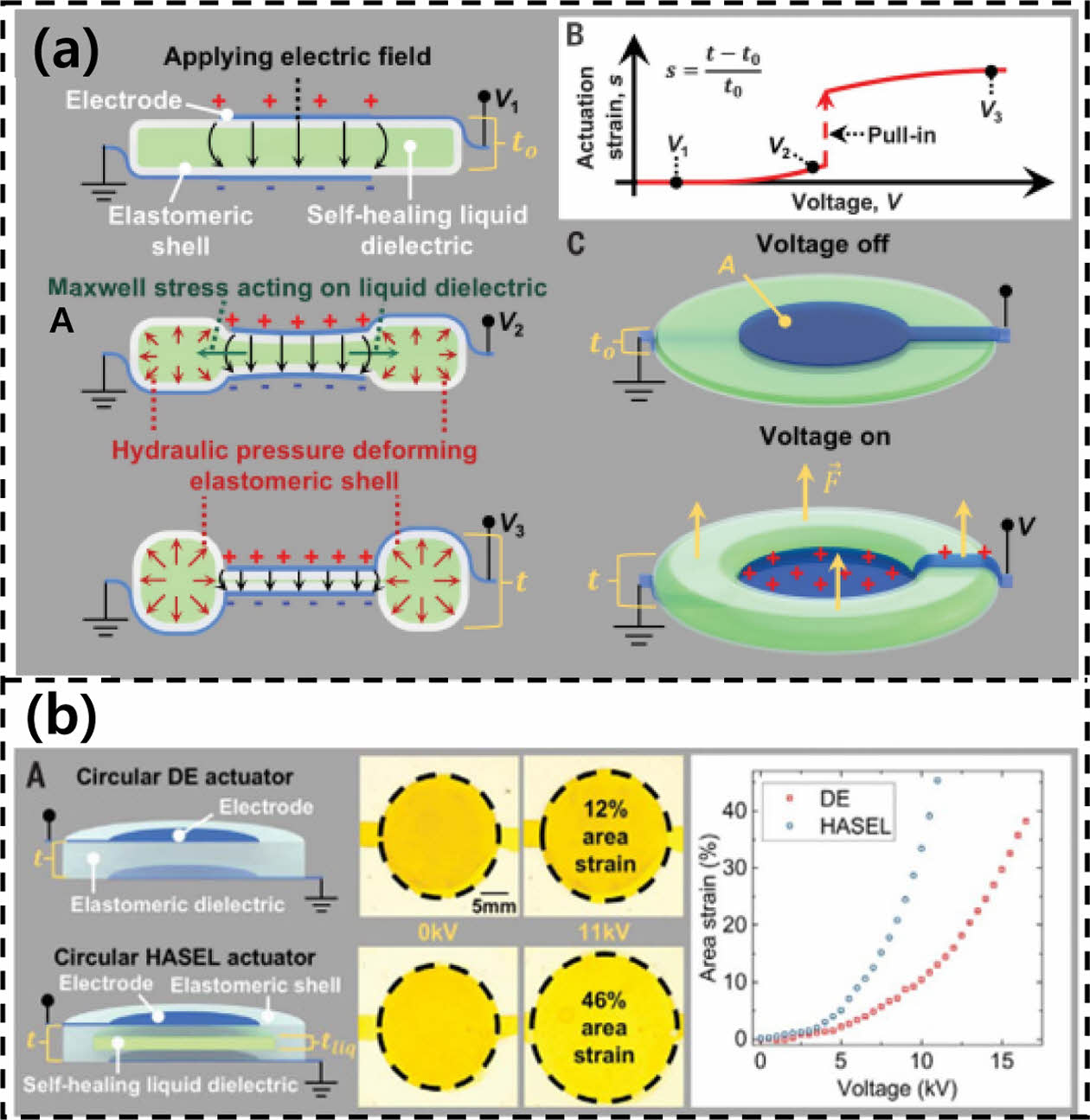
유압증폭 자가치유 정전(HASEL) 액추에이터는 기존의 EAP들 중 비교적 최근에 보고된 기술로, 전기 정전력과 유압 증폭을 결합한 구동 메커니즘을 갖고 있다(Fig. 11a). HASEL은 자가 치유가 가능한 유전성 액체를 사용하여 절연 파괴에 의해 액추에이터의 성능이 감소하지 않는다는 장점이 있다. 또한, HASEL은 제작 방법이 간단하고 응답 속도도 매우 빠르며, 우수한 힘과 동시에 유연성도 갖추고 있어 로봇, 웨어러블 장치, 소프트 로봇 등 다양한 분야에서 유망한 응용 가능성을 보이고 있다.
Keplinger et al.은 최초로 HASEL 액추에이터를 제작하여 보고하였다[57]. Fig. 11a에 나타나 있듯이 최초의 HASEL은 도넛 모양이었으며, 외부는 탄성을 띄는 쉘, 내부는 자가 치유가 가능한 유전성 액체, 중심부는 쉘 외부 표면에 전극을 부착한 구조로 제작하였다. HASEL은 전극에 전압을 인가하면 유전성 액체가 전극이 없는 부분에 모이게 되고, 이로 인해 기계적 변형과 수압이 발생함으로써 구동된다. 본 논문에서는 5개의 HASEL을 적층한 구조의 액추에이터에서 37%의 변형률이 측정되었으며, DEA와 면적 변형률 비교에서는 DEA는 12%, HASEL은 46%(11 kV)로 우수한 성능을 보였다(Fig. 11b). 도넛형 HASEL 액추에이터는 그리퍼와 로봇 팔 메커니즘을 구현할 수 있음을 시연하였고, 넓은 응용 가능성을 보여 주었다. HASEL의 구조 변형에 대한 연구도 진행되었는데, 피아노 HASEL(Peano-HASEL)로 명명한 새로운 구조의 HASEL 액추에이터가 발표되었다[58].
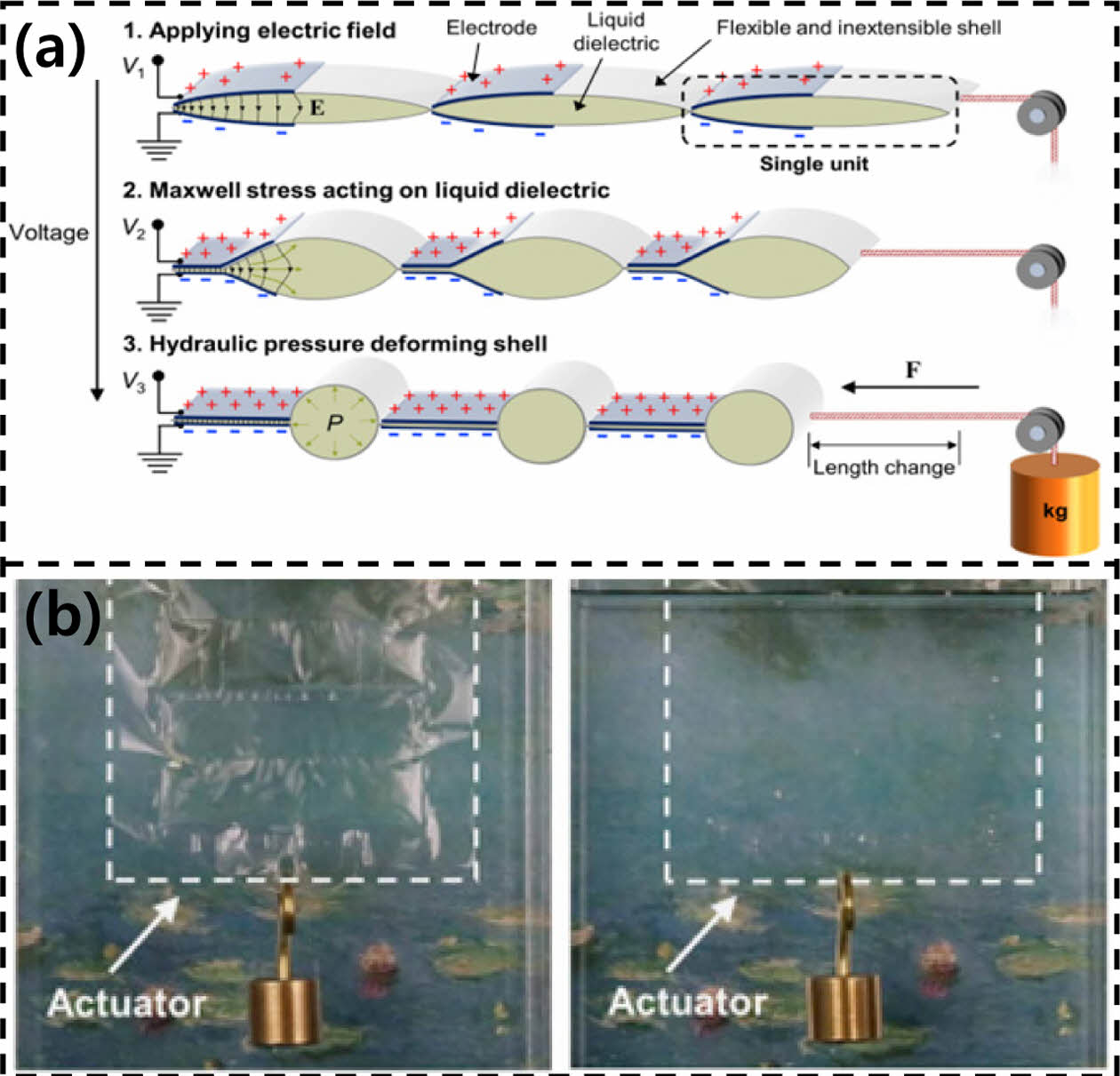
앞선 도넛형 HASEL과 달리(두께 방향으로 길이 팽창) 피아노 HASEL은 구동 시 길이 방향으로 수축 운동을 하는 것이 특징이었다(Fig. 12a). 해당 논문에서는 피아노 HASEL의 제조 방법을 설명하였고, 이를 병렬로 겹친 구조는 더 큰 무게를 들어올릴 수 있음을 보여주었다. 또한, 피아노 HASEL의 빠르고 정확한 구동 성능을 보여주기 위해 탁구공을 던지는 아크릴 팔을 개발하였다. 뿐만 아니라 HASEL의 정전용량을 감지해 변위를 예측하는 자체 감지 시스템과, 투명한 전극과 투명한 유전성 액체를 사용해 눈에 보이지 않는 피아노 HASEL을 제작하고 발표하였다(Fig. 12b).
HASEL 액추에이터의 성능을 개선하려는 연구들은 HASEL 액추에이터 성능 예측 모델을 제작하려는 시도와 함께 이루어졌다. 먼저, 피아노 HASEL 액추에이터의 성능을 개선하기 위한 연구에선 액추에이터의 구조나 재료가 성능에 미치는 영향을 파악하기 위한 실험을 수행하였다[59]. 논문에서는 실험을 통해 액추에이터의 성능을 예측하는 모델을 제작하였고, 이를 통해 성능에 가장 큰 영향을 주는 설계 변수를 알아낼 수 있었다. 이러한 결과는 최초로 HASEL 액추에이터를 이론 기반의 설계로 제작이 가능하도록 만들었다. 하지만 예측 모델은 액추에이터의 정적 성능만을 예측하여, 유전성 액체의 점도 및 관성과 같은 동적 효과를 고려하지 않았다는 한계가 있었다. 따라서, 제작된 예측 모델은 액추에이터의 재료와 구조에 대한 성능 예측만이 유효하며, 유전성 액체의 물성이 더 중요한 영향을 미치는 상황에서는 수정이 필요하다고 발표하였다. 이후의 연구에서는 톱니 모양의 전극을 사용해 기존 피아노 HASEL 액추에이터의 변형률(약 15%)보다 더 큰 변형률(약 24%)을 나타내는 HS-피아노-HASEL 액추에이터를 제작하였다[60]. 연구에서는 HS-피아노-HASEL 액추에이터에 대한 분석 모델과 실제 실험을 통해 준정적 상태의 특성을 평가하였고, 성능을 개선하는 방법까지 제시하였다. HS-피아노-HASEL은 원형의 인공 근육(ACM)과 도르레 시스템으로 제작되어 ACM의 펌핑 구동과 도르레 메커니즘을 시연해 로봇 시스템으로 적용 가능성을 제시하였다.
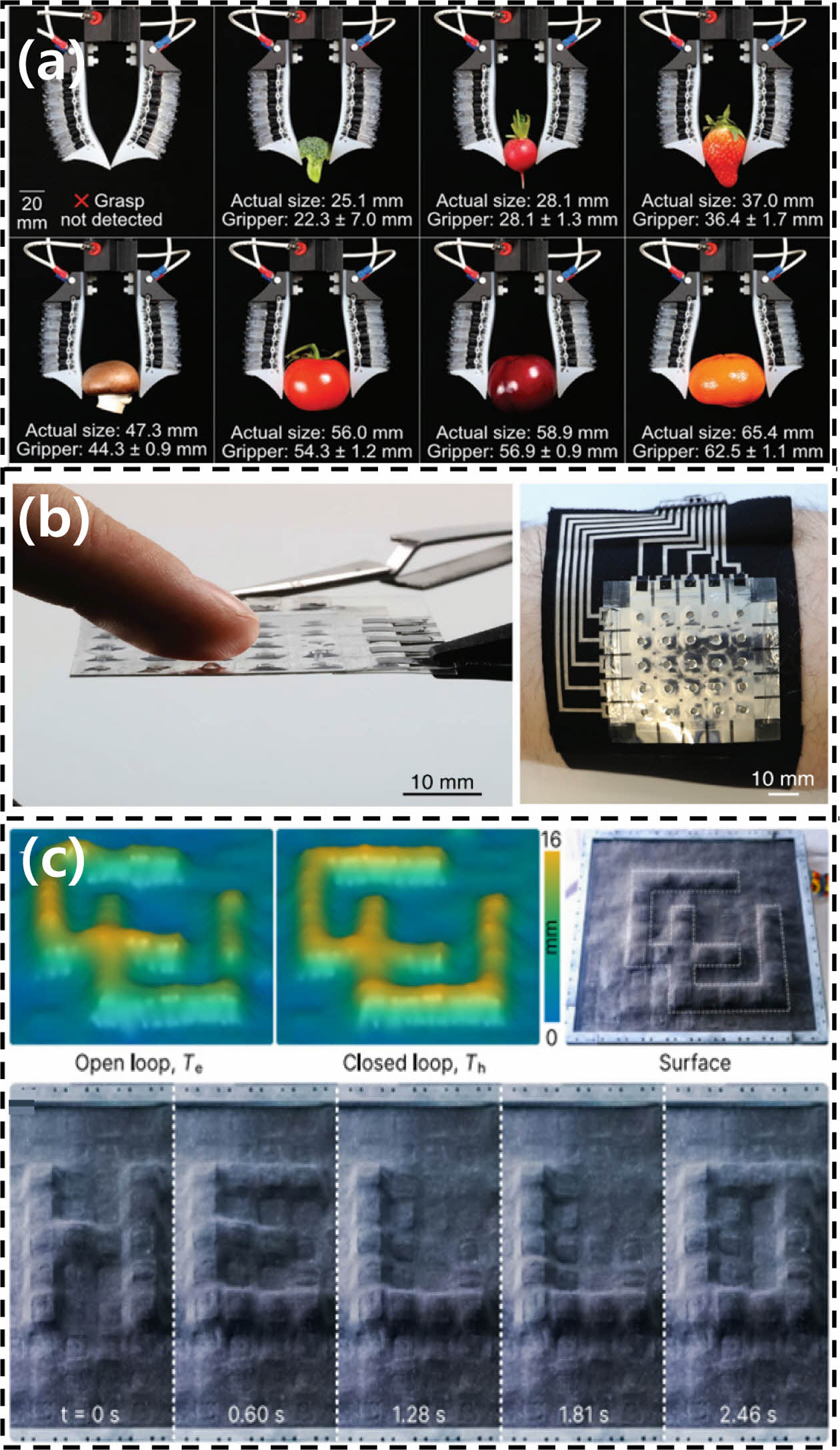
다양한 응용성이 검토되는 HASEL 액추에이터는 로봇과 햅틱 분야에서 특히나 많은 예시들이 보고되고 있다. 최초로 HASEL 액추에이터를 제작한 논문에서는 층을 쌓은 HASEL 구조로 그리퍼 시스템을 제안하였다[57]. 해당 논문에서의 액추에이터 구조는 도넛형 HASEL을 사용하였고, 단순한 팽창 변형으로 물체를 잡는 메커니즘을 보여주었다. Cha et al.은 굽힘 변형 메커니즘을 가진 HASEL 기반 그리퍼 로봇을 제작하였다[61]. 여기서 제작된 HASEL 액추에이터는 변형이 제한되는 실리콘 플레이트를 백본 플레이트로 사용해 굽힘 변형을 유도한다. 논문에서는 해당 액추에이터에 대해 구동 전압, 주파수, 원형 부피당 유전성 액체의 부피비에 따른 성능을 조사하였고, 액추에이터를 통해 제작된 그리퍼 로봇으로 탁구공, 알루미늄 호일, 마쉬멜로우, 풍선을 잡는 모습을 발표하였다. HASEL 기반 그리퍼는 단순히 물체를 잡는 동작 외에도, 추가적인 기능을 탑재할 수 있었다. Kaltenbrunner et al.은 생분해성 기능이 있는 필름과 유전성 액체를 사용해 생분해성 HASEL 액추에이터를 제작하였고, 이를 이용하여 그리퍼 로봇을 구현하였다[62]. 논문에서는 생분해성 필름(바이오폴리에스터, BOPLA 등)과 유전성 액체(FR3, 올리브 오일 등)의 종류에 따른 액추에이터 성능을 측정하였고, 최종적으로 거미에서 영감을 받은 조인트 액추에이터(SES)를 구상하여 그리퍼 로봇 암을 제작하고 발표하였다. 로봇의 재료들은 모두 친환경적인 MOF(외관), PLA(마운트) 그리고 생분해성 HASEL 액추에이터를 사용했다는 특징이 있다. 이러한 연구와 비슷하게, 최근 Shintake et al.은 생분해성 물질들로 이뤄진 새로운 HASESL 액추에이터를 발표하였다[63]. 연구에서는 HASEL을 구성하는 유전성 필름을 폴리 유산(PLA)과 폴리부틸렌 아디페이트 코 테레프탈레이트(PBAT)으로, 유전성 액체는 콩기름으로, 전극은 젤라틴, 글리세롤 그리고 염화나트륨(NaCl)을 이용하여 제작하였다. 제작된 액추에이터는 NaCl가 첨가된 비율에 따라 영 계수와 비저항에 영향을 주었으며, 10 wt%에서 최대 비저항 258 Ωm이 측정되었고, 1.0 wt%에서 영 계수가 0.12 Mpa로 나타났다. 구동 성능은 피아노 HASEL의 경우 1 kV 신호에서 0 g의 부하가 걸렸을 때 3.2%의 변형률을 나타냈고, 원형 HASEL의 경우는 8.8 g의 부하에서 최대 18.6%의 변형률을 나타내었다. 이러한 결과는 생분해성 HASEL 액추에이터가 기존의 HASEL 액추에이터에 견줄만 한 성능을 가지고 있음을 시사하며, 친환경 소프트 로봇에서 생분해성 HASEL 액추에이터의 적극적인 활용 가능성을 보여주었다. 물체의 크기를 감지하는 기능이 있는 그리퍼 로봇도 발표되었다[64]. 해당 연구의 그리퍼에 사용된 액추에이터는 단일 피아노 HASEL 액추에이터를 적층한 구조와 변형을 제한하는 층을 결합해 제작하였다. 그리퍼의 물체 크기 감지 기능은 액추에이터의 굽힘 정도에 따라서 변화하는 정전용량을 측정하여 구현되었다. 해당 기능은 Fig. 13a에 나타나 있듯이 브로콜리, 래디시, 딸기, 버섯, 토마토, 자두, 귤의 크기를 감지할 수 있었다. 또한, 마이크로 컨트롤러를 탑재한 전자회로를 부착하여 상업용 그리퍼 로봇 암과 쉽게 호환될 수 있도록 하였으며, 이를 통한 그리퍼 로봇도 시연하였다. Yeow et al.은 HASEL을 기반으로 한 센티미터 크기의 소형 크롤링 로봇을 제작하였다[65]. 연구에서는 로봇의 전극을 2×2 매트릭스 구조로 배치하고, 조이스틱을 활용한 회로를 구성해 로봇이 자유롭게 2차원 평면 운동이 가능하도록 제작하였다. 뿐만 아니라, 로봇에 방수 코팅을 추가하여 수중에서도 작동할 수 있도록 만들었다.
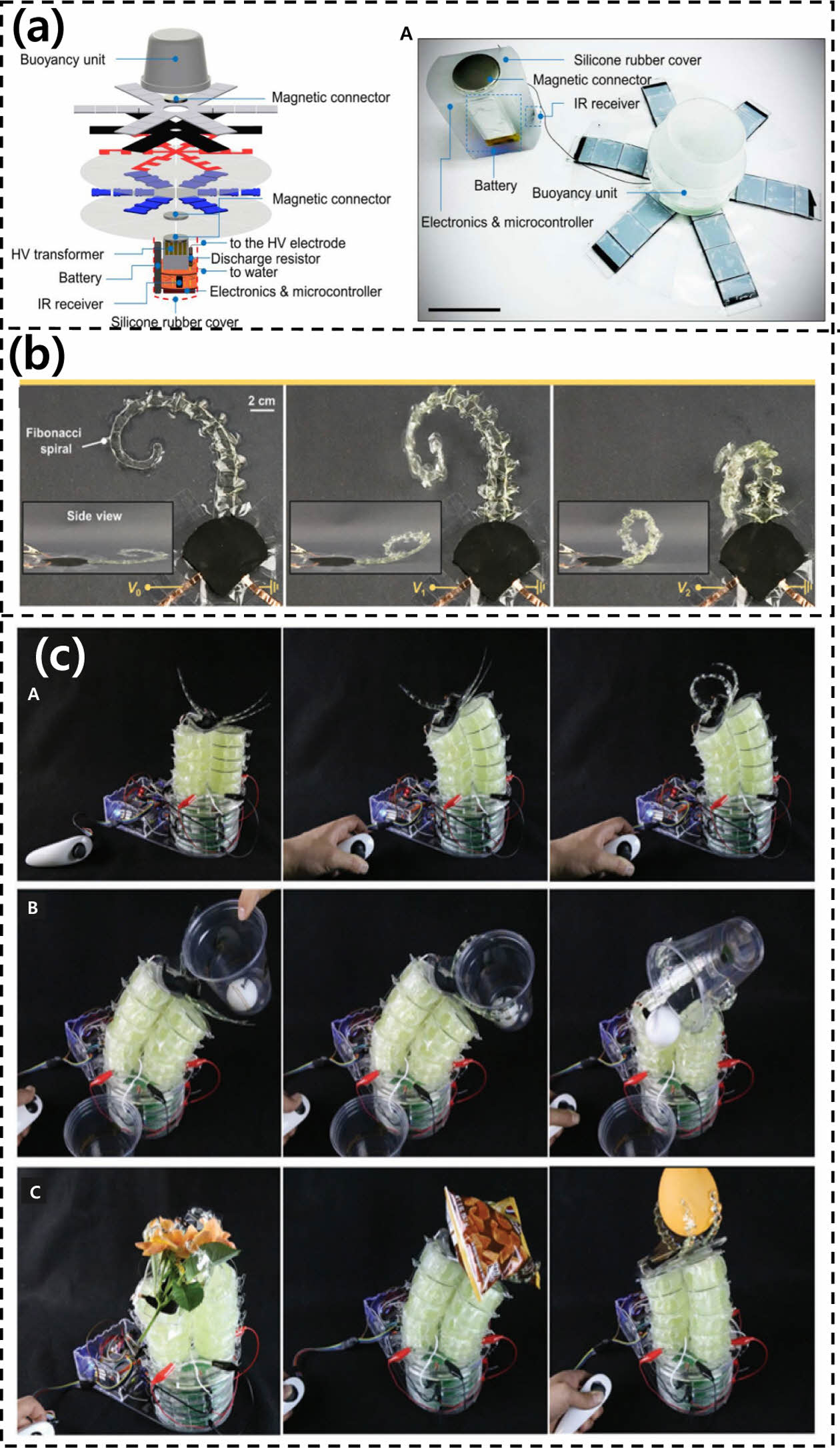
Shea et al.은 HASEL의 원리를 활용한 촉감 전달 장치(HAXEL)를 개발하였다(Fig. 13b)[66]. HAXEL는 전기적 신호를 통해 기계적 신호를 인간에게 전달하는 일종의 햅틱 기기이며, 논문에서는 HAXEL을 통해 위아래, 좌우, 앞뒤, 회전 등의 기계적 신호를 손가락으로 전달할 수 있었다. 논문에서는 촉감 실험에 스테어 케이스법을 적용해 인간이 감지할 수 있는 최소한의 구동 전압 500 V을 구하였고, 혼동 행렬을 사용해 사용자가 신호를 정확하게 인식하는 정도(69~100%의 정확도)를 도식화 하였다. Rentschler et al.도 HASEL을 통해 햅틱 장치를 구성하였는데, 이는 Fig. 13c에 나타나 있다[67]. 제작된 햅틱 장치는 접이식 HASEL 액추에이터의 적층 구조를 구동기로, 소프트 자석을 센서로 사용하였고, 제어 회로도 함께 구성되었다. 햅틱 장치는 최대 50 Hz에서 가역적 형상 모핑과, 각 셀 당 최소 0.1 mm, 50 mN의 표면 변형 감지 기능을 보였으며, 이를 통해 이미지 표시, 물체 질량 측정, 고체 및 액체의 움직임 제어, 사용자와 상호작용 등의 작동을 시연하였다. Sitti et al.은 HASEL을 통해 물속에서 작동하는 해파리 로봇을 개발하였다[68]. 해파리 로봇의 구조는 Fig. 14a에 나타나 있으며, 해파리 로봇은 모양이 일정하지 않은 물체들을 운송하는 기능과 좌우로 운동 방향을 제어하는 기능 그리고 해파리 로봇이 서로 협동하는 기능 등을 갖추었다. 또한, 전자회로와 마이크로 컨트롤러를 해파리 로봇에 적용해 무선 해파리 로봇을 제작하였고, 이를 실제 물탱크와 연못에서 작동시키며 1시간 이상의 작동이 가능함을 보여주었다. 논문에서는 해파리 로봇이 구동 소음을 발생하지 않고, 전류 누설 발생시 물에 흐르는 전류도 무해할 정도로 낮기 때문에 해양 야생 생태계에 어떠한 피해도 주지 않는다고 발표하였다. 이러한 결과로, 해파리 로봇의 설계는 차세대 수중 차량 개발에 지침이 될 수 있을 것으로 기대된다. Fig. 14b와 Fig. 14c에 나타나 있듯이, 지네 꼬리에 영감을 받은 HASEL 액추에이터와 코끼리 코에 영감을 받은 Terry 로봇은 기존 HASEL 제작 방식보다 간단하고 저렴한 3축 CNC 열 밀봉 기계 제작법을 통해 구현되었다[69]. 이러한 제작 방식은 7.8 kV, 3.9 Hz에서 5 cm를 점프하는 11개의 도넛형 HASEL을 쌓은 액추에이터와, 세 개의 모듈식으로 구성한 도넛형 HASEL 액추에이터를 조이스틱으로 사용하는 구슬 미로 게임 장치도 만들 수 있었다. 이처럼 HASEL의 더욱 간편하고 새로운 제작 방식은 HASEL 액추에이터에 다양한 시도가 가능하도록 만들었다. Katzschmann et al.은 1.1 kV에서 작동하는 저전압 HASEL 액추에이터(HALVE)를 제작함으로써, 기존의 HASEL 액추에이터의 높은 구동 전압을 현저하게 낮춘 연구를 발표하였다[70]. 연구에서는 큰 유전 상수와 압전 효과를 갖춘 P(VDF-TrFE-CTFE) 고분자를 HASEL의 양 전극 사이에 얇게 배치하였고, 이를 통해 낮은 전압에서도 구동되는 HALVE 액추에이터를 제작할 수 있었다. HALVE는 외부가 BoPET 필름에 의해 덮어져, 전극이 외부에 노출되어 있지 않아 안전하게 만질 수 있었으며, 방수의 기능도 제공하였다. 낮은 전압 구동은 HALVE 액추에이터가 원격으로 작동되는 그리퍼와 소프트 인공 물고기 로봇을 쉽게 제작할 수 있도록 해주었으며, 이는 HALVE가 원격 로봇 제작에 적합함을 보여주었다.
|
Fig. 7 (a) Working mechanism of DEA. Reproduced with permission from Ref. [31]. Copyright 2000, American Association for the Advancement of Science (b) Bending actuation of the UNDE film toward the surface with concentrated BNNS. Reproduced with permission from Ref. [37]. Copyright 2022, American Association for the Advancement of Science (c) Optical images of MGSBS elastomer self-healing process. Reproduced with permission from Ref. [38]. Copyright 2019, Wiley-VCH |
|
Fig. 8 (a) The working mechanism and structure of DEA with SMP and Optical images of DEA actuation. Reproduced with permission from Ref. [39]. Copyright 2020, WileyVCH (b) Schematic illustration of the fabrication process for printing DEAs. Reproduced with permission from Ref. [40]. Copyright 2020, Wiley-VCH (c) Transparent actuator capable of fast voltage-induced deformation. Reproduced with permission from Ref. [42]. Copyright 2013, American Association for the Advancement of Science |
|
Fig. 9 (a) Left is ball toss process by the PHDE actuator and right is a jumping robot with the PHDE actuator. Reproduced with permission from Ref. [36]. Copyright 2022, American Association for the Advancement of Science (b) Structure of the electroadhesion-enabled soft gripper, and demonstration of gripping different objects. Reproduced with permission from Ref. [49]. Copyright 2016, Wiley-VCH |
|
Fig. 10 (a) An optical zoom system driven by the disc-shaped linear DEA(lens motor). Reproduced with permission from Ref. [37]. Copyright 2022, American Association for the Advancement of Science (b) Untethered FT-DEA for wireless feel-through haptics. Reproduced with permission from Ref. [50]. Copyright 2021, Wiley-VCH (c) Transparent loudspeaker that shows the laptop screen. Reproduced with permission from Ref. [42]. Copyright 2013, American Association for the Advancement of Science |
|
Fig. 11 (a) Basic structure and actuation principle of HASEL actuators and (b) a circular planar HASEL actuator achieves larger area strain than DEA. Reproduced with permission from Ref. [57]. Copyright 2018, American Association for the Advancement of Science |
|
Fig. 12 (a) Basic structure and actuation principle of PeanoHASEL actuators and (b) invisible Peano-HASEL. Reproduced with permission from Ref. [58]. Copyright 2018, American Association for the Advancement of Science |
|
Fig. 13 (a) The grasp and size detection worked effectively for objects of various sizes. Reproduced with permission from Ref. [64]. Copyright 2022, Wiley Online Library (b) Hydraulically amplified taxels (HAXEL). Reproduced with permission from Ref. [66]. Copyright 2020, Wiley Online Library (c) System of Shape displays and Demonstration of a high-speed scrolling text display. Reproduced with permission from Ref. [67]. Copyright 2023, Nature Publishing Group UK London |
|
Fig. 14 (a) A prototype of a wireless HASEL jellyfish robot. Reproduced with permission from Ref. [68]. Copyright 2023, American Association for the Advancement of Science (b) Bioinspired designs that contract, curl and twist and (c) untethered soft robot for grasping and manipulation called ‘Terry the trunk’. Reproduced with permission from Ref. [69]. Copyright 2019, Wiley-VCH |
이 연구는 전기 활성 고분자 액추에이터의 다양한 형태와 그들의 원리, 제작 방법, 성능 개선 방안, 응용 가능성 등에 대해 광범위하게 조사하였다. 이온성 EAP 중에서, IPMC는 제작 시간 단축, 전극 및 전해질 성능의 개선과 새로운 기술과의 결합을 통해 더욱 효율적이고 다양한 기능을 가진 액추에이터로 발전하고 있으며, 이를 통해 소프트 로봇, 생체 모방 기술 등에 대한 적용 가능성이 넓게 확대되고 있다. CP는 성능 개선을 위한 고분자 합성 연구와 전도성 고분자 및 전해질의 조합 또는 합성 방법에 따른 특성을 조사하였다. 이러한 연구들은 향후 연구자들이 CP 액추에이터를 설계하고 제작함에 있어 보다 정보에 기반한 결정을 내리는데 도움이 될 것으로 기대된다. 또한, 새로운 공정 기술에 기반한 CP 제작 방식 연구들은 대량 생산, 마이크로 크기의 액추에이터 및 장치 개발을 가능하게 하며, 이는 정밀 제어가 요구되는 분야에 큰 잠재력을 보여준다.
전기성 EAP의 경우, DEA는 고분자를 통한 성능 개선과 기능성 DEA 제작 그리고 다양한 응용 장치들에 대한 연구가 집중되어 있음을 확인하였다. DEA의 지속적인 성능 개선 연구와, 새로운 기능들의 탄생은 앞서 소개된 소프트 로봇, 미세유체 분야, 광학 장치, 스피커, 비자성모터, 햅틱 등의 다양한 응용 분야를 넘어 새로운 응용 분야로의 발전 가능성을 열어줄 것으로 기대된다. 강유전 고분자 액추에이터는 PVDF의 압전성을 발견한 논문을 시작으로, 강유전 고분자의 개질과 나노복합소재 제작을 통해 압전 성능을 향상시켜 액추에이터의 성능을 개선하고자 하였다. HASEL 액추에이터에 대한 연구는 예측 모델을 통한 성능 개선, 효율적인 제작 방법, 새로운 구조 또는 기능을 탐구하는 연구들이 보고되었다. 조사된 연구들을 통해 HASEL이 생체 모방 기술, 소프트 로봇, 햅틱 장치 등의 분야에서 우수한 적합성을 가지고 있음을 확인하였다. 또한, HASEL의 효율적인 제작 방식은 액추에이터에 다양한 시도를 촉진하였고, 이러한 연구 결과는 HASEL이 빠르게 산업 분야에 적용될 가능성을 보여주었다.
본 연구를 통해 EAP 액추에이터들이 소프트 로봇, 생체 모방 기술, 웨어러블 장치 및 햅틱 기술과 같은 분야에서 중요한 역할을 할 수 있음을 확인하였다. 각 액추에이터의 새로운 적용 분야 개발과 성능 개선을 위한 노력은 액추에이터가 더욱 넓은 응용 분야로의 확장 가능성을 열어줄 것이다.
- 1. Shahinpoor, M. and Kim, K.J., “Ionic polymer-metal composites: I. Fundamentals,” Smart Materials and Structures, Vol. 10, No. 4, 2001, pp. 819.
-

- 2. Kim, K.J. and Shahinpoor, M., “Ionic polymer-metal composites: II. Manufacturing techniques,” Smart Materials and Structures, Vol. 12, No. 1, 2003, pp. 65.
-
- 3. Fukushima, T., Asaka, K., Kosaka, A. and Aida, T., “Fully plastic actuator through layer‐by‐layer casting with ionic‐liquid‐based bucky gel,” Angewandte Chemie, Vol. 117, No. 16, 2005, pp. 2462-2465.
-
- 4. Kotal, M., Kim, J., Kim, K.J. and Oh, I.K., “Sulfur and nitrogen co-doped graphene electrodes for high-performance ionic artificial muscles,” Advanced Materials (Deerfield Beach, Fla.), Vol. 28, No. 8, 2016, pp. 1610-1615.
-
- 5. Roy, S., Kim, J., Kotal, M., Tabassian, R., Kim, K.J. and Oh, I.K., “Collectively exhaustive electrodes based on covalent organic framework and antagonistic Co‐doping for electroactive ionic artificial muscles,” Advanced Functional Materials, Vol. 29, No. 17, 2019, pp. 1900161.
-
- 6. Umrao, S., Tabassian, R., Kim, J., Nguyen, V.H., Zhou, Q., Nam, S. and Oh, I.K., “MXene artificial muscles based on ionically cross-linked Ti3C2Tx electrode for kinetic soft robotics,” Science Robotics, Vol. 4, No. 33, 2019, pp. eaaw7797.
-
- 7. Liu, L., Wang, C., Wu, Z. and Xing, Y., “Ultralow-voltage-drivable artificial muscles based on a 3D structure MXene-PEDOT: PSS/AgNWs electrode,” ACS Applied Materials & Interfaces, Vol. 14, No. 16, 2022, pp. 18150-18158.
-
- 8. Garai, M., Mahato, M., Nam, S., Kim, E., Seo, D., Lee, Y., Nguyen, V.H., Oh, S., Sambyal, P., Yoo, H., Taseer, A.K., Syed, S.A., Han, H., Ahn, C.W., Kim, J. and Oh. I.K., “Metal organic framework‐MXene nanoarchitecture for fast responsive and ultra‐stable electro‐ionic artificial muscles,” Advanced Functional Materials, Vol. 33, No. 10, 2023, pp. 2212252.
-
- 9. Mahato, M., Hwang, W., Tabassian, R., Oh, S., Nguyen, V.H., Nam, S., Kim, J., Yoo, H., Taseer, A.K., Lee, M., Zhang, H., Song, T.E. and Oh, I.K., “A dual‐responsive magnetoactive and electro-ionic soft actuator derived from a nickel‐based metal-organic framework,” Advanced Materials, Vol. 34, No. 35, 2022, pp. 2203613.
-
- 10. Raza, U., Oh, S., Tabassian, R., Mahato, M. and Oh, I.K., “Micro-structured porous electrolytes for highly responsive ionic soft actuators,” Sensors and Actuators B: Chemical, Vol. 352, 2022, pp. 131006.
-
- 11. Kim, O., Shin, T.J. and Park, M.J., “Fast low-voltage electroactive actuators using nanostructured polymer electrolytes,” Nature communications, Vol. 4, No. 1, 2013, pp. 2208.
-
- 12. Nguyen, V.H., Kim, J., Tabassian, R., Kotal, M., Jun, K., Oh, J., Son, J., Manzoor, M.T., Kim, K.J. and Oh, I.K., “Electroactive Artificial Muscles Based on Functionally Antagonistic Core-Shell Polymer Electrolyte Derived from PS‐b‐PSS Block Copolymer,” Advanced Science, Vol. 6, No. 5, 2019, pp. 1801196.
-
- 13. Nguyen, V.H., Oh, S., Mahato, M., Tabassian, R., Yoo, H., Lee, S., Garai, M., Kim, K.J. and Oh, I.K., “Functionally antagonistic polyelectrolyte for electro-ionic soft actuator,” Nature Communications, Vol. 15, No. 1, 2024, pp. 435.
-
- 14. Wang, F., Huang, D., Li, Q., Wu, Y., Yan, B., Wu, Z. and Park, S., “Highly electro-responsive ionic soft actuator based on graphene nanoplatelets-mediated functional carboxylated cellulose nanofibers,” Composites Science and Technology, Vol. 231, 2023, pp. 109845.
-
- 15. Tabassian, R., Nguyen, V.H., Umrao, S., Mahato, M., Kim, J., Porfiri, M. and Oh, I.K., “Graphene Mesh for Self‐Sensing Ionic Soft Actuator Inspired from Mechanoreceptors in Human Body,” Advanced Science, Vol. 6, No. 23, 2019, pp. 1901711.
-
- 16. Zhu, Z., Cheng, S., Han, J., Yan, S., Fan, P., Hu, Q. and Tang, Z., “Electrically Reconfigurable Metasurfaces for Frequency Selective Transmission via IPMC Kirigami,” Advanced Materials Technologies, Vol. 9, No. 7 2024, pp. 2301879.
-
- 17. Otero, T.F., Angulo, E., Rodriguez, J. and Santamaria, C., “Electrochemomechanical properties from a bilayer: polypyrrole/non-conducting and flexible material—artificial muscle,” Journal of Electroanalytical Chemistry, Vol. 341, No. 1-2, 1992, pp. 369-375.
-
- 18. Pei, Q. and Inganäs, O., “Electrochemical muscles: bending strips built from conjugated polymers,” Synthetic Metals, Vol. 57, No. 1, 1993, pp. 3718-3723.
-
- 19. Torop, J., Aabloo, A. and Jager, E.W., “Novel actuators based on polypyrrole/carbide-derived carbon hybrid materials,” Carbon, Vol. 80, 2014, pp. 387-395.
-
- 20. Otero, T.F., Schumacher, J. and Pascual, V.H., “Construction and coulodynamic characterization of PPy-DBS-MWCNT/tape bilayer artificial muscles,” RSC Advances, Vol. 6, No. 72, 2016, pp. 68538-68544.
-
- 21. Pang, D., Wang, X., Liu, C., Xu, H., Chen, G., Du, F., Dall'Agnese, Y. and Gao, Y., “A synergistic Ti3C2Tx/PPy bilayer electrochemical actuator,” Applied Surface Science, Vol. 583, 2022, pp. 152403.
-
- 22. Ting, M.S., Narasimhan, B.N., Travas-Sejdic, J. and Malmström, J., “Soft conducting polymer polypyrrole actuation based on poly(N-isopropylacrylamide) hydrogels,” Sensors and Actuators B: Chemical, Vol. 343, 2021, pp. 130167.
-
- 23. Chen, X., Xing, K. and Inganäs, O., “Electrochemically induced volume changes in poly(3, 4-ethylenedioxythiophene),” Chemistry of Materials, Vol. 8, No. 10, 1996, pp. 2439-2443.
-
- 24. Põldsalu, I., Rohtlaid, K., Nguyen, T.M.G., Plesse, C., Vidal, F., Khorram, M.S., Peikolainen, A., Tamm, T. and Kiefer, R., “Thin ink-jet printed trilayer actuators composed of PEDOT: PSS on interpenetrating polymer networks,” Sensors and Actuators B: Chemical, Vol. 258, 2018, pp. 1072-1079.
-
- 25. Rohtlaid, K., Nguyen, G.T., Soyer, C., Cattan, E., Vidal, F. and Plesse, C., “Poly(3, 4‐ethylenedioxythiophene): Poly(styrene sulfonate)/polyethylene oxide electrodes with improved electrical and electrochemical properties for soft microactuators and microsensors,” Advanced Electronic Materials, Vol. 5, No. 4, 2019, pp. 1800948.
-
- 26. Taccola, S., Greco, F., Mazzolai, B., Mattoli, V. and Jager, E., “Thin film free-standing PEDOT: PSS/SU8 bilayer microactuators,” Journal of Micromechanics and Microengineering, Vol. 23, No. 11, 2013, pp. 117004.
-
- 27. Zhang, P., Zhu, B., Luo, Y. and Travas‐Sejdic, J., “Micropipette‐Based Fabrication of Free‐Standing, Conducting Polymer Bilayer Actuators,” Advanced Materials Technologies, Vol. 7, No. 12, 2022, pp. 2200686.
-
- 28. Tyagi, M., Fathollahzadeh, M., Martinez, J.G., Mak, W.C., Filippini, D. and Jager, E.W., “Radially actuating conducting polymer microactuators as gates for dynamic microparticle sieve based on printed microfluidics,” Sensors and Actuators B: Chemical, Vol. 382, 2023, pp. 133448.
-
- 29. Temmer, R., Maziz, A., Plesse, C., Aabloo, A., Vidal, F. and Tamm, T., “In search of better electroactive polymer actuator materials: PPy versus PEDOT versus PEDOT-PPy composites,” Smart Materials and Structures, Vol. 22, No. 10, 2013, pp. 104006.
-
- 30. Gaihre, B., Ashraf, S., Spinks, G.M., Innis, P.C. and Wallace, G.G., “Comparative displacement study of bilayer actuators comprising of conducting polymers, fabricated from polypyrrole, poly(3, 4-ethylenedioxythiophene) or poly(3, 4-propylenedioxythiophene),” Sensors and Actuators A: Physical, Vol. 193, 2013, pp. 48-53.
-
- 31. Pelrine, R., Kornbluh, R., Pei, Q. and Joseph, J., “High-speed electrically actuated elastomers with strain greater than 100%,” Science, Vol. 287, No. 5454, 2000, pp. 836-839.
-
- 32. Lee, H., Jung, K., Han, M. and Chang, S., “A Study on the Fabrication of Flexible Composite Electrodes and Its Bonding Characteristics According to Surface Roughness,” Composites Research, Vol. 27, No. 6, 2014, pp. 242-247.
-
- 33. Pelrine, R., Kornbluh, R., Joseph, J., Heydt, R., Pei, Q. and Chiba, S., “High-field deformation of elastomeric dielectrics for actuators,” Materials Science and Engineering: C, Vol. 11, No. 2, 2000, pp. 89-100.
-
- 34. Ha, S.M., Yuan, W., Pei, Q., Pelrine, R. and Stanford, S., “Interpenetrating networks of elastomers exhibiting 300% electrically-induced area strain,” Smart Materials and Structures, Vol. 16, No. 2, 2007, pp. S280.
-
- 35. Yin, L., Zhao, Y., Zhu, J., Yang, M., Zhao, H., Pei, J., Zhong, S. and Dang, Z., “Soft, tough, and fast polyacrylate dielectric elastomer for non-magnetic motor,” Nature communications, Vol. 12, No. 1, 2021, pp. 4517.
-
- 36. Shi, Y., Askounis, E., Plamthottam, R., Libby, T., Peng, Z., Youssef, K., Pu, J., Pelrine, R. and Pei, Q., “A processable, high-performance dielectric elastomer and multilayering process,” Science, Vol. 377, No. 6602, 2022, pp. 228-232.
-
- 37. Pu, J., Meng, Y., Xie, Z., Peng, Z., Wu, J., Shi, Y., Plamthottam, R., Yang, W. and Pei, Q., “A unimorph nanocomposite dielectric elastomer for large out-of-plane actuation,” Science Advances, Vol. 8, No. 9, 2022, pp. eabm6200.
-
- 38. Zhang, Y., Ellingford, C., Zhang, R., Roscow, J., Hopkins, M., Keogh, P., McNally, T., Bowen, C. and Wan, C., “Electrical and mechanical self‐healing in high‐performance dielectric elastomer actuator materials,” Advanced Functional Materials, Vol. 29, No. 15, 2019, pp. 1808431.
-
- 39. Aksoy, B. and Shea, H., “Reconfigurable and Latchable Shape‐Morphing Dielectric Elastomers Based on Local Stiffness Modulation,” Advanced Functional Materials, Vol. 30, No. 27, 2020, pp. 2001597.
-
- 40. Chortos, A., Hajiesmaili, E., Morales, J., Clarke, D.R. and Lewis, J.A., “3D printing of interdigitated dielectric elastomer actuators,” Advanced Functional Materials, Vol. 30, No. 1, 2020, pp. 1907375.
-
- 41. Hwang, T., Kwon, H., Oh, J., Hong, J., Hong, S., Lee, Y., Ryeol Choi, H., Jin Kim, K., Hossain Bhuiya, M. and Nam, J., “Transparent actuator made with few layer graphene electrode and dielectric elastomer, for variable focus lens,” Applied Physics Letters, Vol. 103, No. 2, 2013,
-
- 42. Keplinger, C., Sun, J., Foo, C.C., Rothemund, P., Whitesides, G.M. and Suo, Z., “Stretchable, transparent, ionic conductors,” Science, Vol. 341, No. 6149, 2013, pp. 984-987.
-
- 43. Jordi, C., Michel, S., Kovacs, G. and Ermanni, P., “Scaling of planar dielectric elastomer actuators in an agonist-antagonist configuration,” Sensors and Actuators A: Physical, Vol. 161, No. 1-2, 2010, pp. 182-190.
-
- 44. Murray, C., McCoul, D., Sollier, E., Ruggiero, T., Niu, X., Pei, Q. and Carlo, D.D., “Electro-adaptive microfluidics for active tuning of channel geometry using polymer actuators,” Microfluidics and nanofluidics, Vol. 14, 2013, pp. 345-358.
-
- 45. Loverich, J.J., Kanno, I. and Kotera, H., “Concepts for a new class of all-polymer micropumps,” Lab on a Chip, Vol. 6, No. 9, 2006, pp. 1147-1154.
-
- 46. Pei, Q., Rosenthal, M., Stanford, S., Prahlad, H. and Pelrine, R., “Multiple-degrees-of-freedom electroelastomer roll actuators,” Smart Materials and Structures, Vol. 13, No. 5, 2004, pp. N86.
-
- 47. Son, J., Lee, S., Bae, G.Y., Lee, G., Duduta, M. and Cho, K., “Skin‐Mountable Vibrotactile Stimulator Based on Laterally Multilayered Dielectric Elastomer Actuators,” Advanced Functional Materials, Vol. 33, No. 23, 2023, pp. 2213589.
-
- 48. Kim, D. and Chang, S., “Design of an actuator using electro-active polymer (EAP) actuator with composite electrodes,” Composites Research, Vol. 32, No. 5, 2019, pp. 211-215.
-
- 49. Shintake, J., Rosset, S., Schubert, B.E., Floreano, D. and Shea, H., “Versatile soft grippers with intrinsic electroadhesion based on multifunctional polymer actuators,” Advanced Materials, Vol. 28, No. 2, 2016, pp. 231-238.
-
- 50. Ji, X., Liu, X., Cacucciolo, V., Civet, Y., El Haitami, A., Cantin, S., Perriard, Y. and Shea, H., “Untethered feel‐through haptics using 18‐µm thick dielectric elastomer actuators,” Advanced Functional Materials, Vol. 31, No. 39, 2021, pp. 2006639.
-
- 51. Zhu, Y., Liu, N., Chen, Z., He, H., Wang, Z., Gu, Z., Chen, Y., Mao, J., Luo, Y. and He, Y., “3D-printed high-frequency dielectric elastomer actuator toward insect-scale ultrafast soft robot,” ACS Materials Letters, Vol. 5, No. 3, 2023, pp. 704-714.
-
- 52. Kawai, H., “The piezoelectricity of poly(vinylidene fluoride),” Japanese Journal of Applied Physics, Vol. 8, No. 7, 1969, pp. 975.
-
- 53. Zhang, Q.M., Bharti, V. and Zhao, X., “Giant electrostriction and relaxor ferroelectric behavior in electron-irradiated poly (vinylidene fluoride-trifluoroethylene) copolymer,” Science, Vol. 280, No. 5372, 1998, pp. 2101-2104.
-
- 54. Pabst, O., Perelaer, J., Beckert, E., Schubert, U.S., Eberhardt, R. and Tünnermann, A., “All inkjet-printed piezoelectric polymer actuators: Characterization and applications for micropumps in lab-on-a-chip systems,” Organic Electronics, Vol. 14, No. 12, 2013, pp. 3423-3429.
-
- 55. Chen, X., Qin, H., Qian, X., Zhu, W., Li, B., Zhang, B., Lu, W., Li, R., Zhang, S. and Zhu, L., “Relaxor ferroelectric polymer exhibits ultrahigh electromechanical coupling at low electric field,” Science, Vol. 375, No. 6587, 2022, pp. 1418-1422.
-
- 56. Shouji, Y., Sekine, T., Ito, K., Ito, N., Yasuda, T., Wang, Y., Takeda, Y., Kumaki, D., Santos, F.D.D. and Miyabo, A., “Fast Response, High‐Power Tunable Ultrathin Soft Actuator by Functional Piezoelectric Material Composite for Haptic Device Application,” Advanced Electronic Materials, 2023, pp. 2201040.
-
- 57. Acome, E., Mitchell, S.K., Morrissey, T.G., Emmett, M.B., Benjamin, C., King, M., Radakovitz, M. and Keplinger, C., “Hydraulically amplified self-healing electrostatic actuators with muscle-like performance,” Science, Vol. 359, No. 6371, 2018, pp. 61-65.
-
- 58. Kellaris, N., Gopaluni Venkata, V., Smith, G.M., Mitchell, S.K. and Keplinger, C., “Peano-HASEL actuators: Muscle-mimetic, electrohydraulic transducers that linearly contract on activation,” Science Robotics, Vol. 3, No. 14, 2018, pp. eaar3276.
-
- 59. Kellaris, N., Venkata, V.G., Rothemund, P. and Keplinger, C., “An analytical model for the design of Peano-HASEL actuators with drastically improved performance,” Extreme Mechanics Letters, Vol. 29, 2019, pp. 100449.
-
- 60. Wang, X., Mitchell, S.K., Rumley, E.H., Rothemund, P. and Keplinger, C., “High‐strain peano‐HASEL actuators,” Advanced Functional Materials, Vol. 30, No. 7, 2020, pp. 1908821.
-
- 61. Park, T., Kim, K., Oh, S. and Cha, Y., “Electrohydraulic actuator for a soft gripper,” Soft Robotics, Vol. 7, No. 1, 2020, pp. 68-75.
-
- 62. Rumley, E.H., Preninger, D., Shagan Shomron, A., Rothemund, P., Hartmann, F., Baumgartner, M., Kellaris, N., Stojanovic, A., Yoder, Z. and Karrer, B., “Biodegradable electrohydraulic actuators for sustainable soft robots,” Science Advances, Vol. 9, No. 12, 2023, pp. eadf5551.
-
- 63. Kanno, R., Caruso, F., Takai, K., Piskarev, Y., Cacucciolo, V. and Shintake, J., “Biodegradable electrohydraulic soft actuators,” Advanced Intelligent Systems, Vol. 5, No. 9, 2023, pp. 2200239.
-
- 64. Yoder, Z., Macari, D., Kleinwaks, G., Schmidt, I., Acome, E. and Keplinger, C., “A soft, fast and versatile electrohydraulic gripper with capacitive object size detection,” Advanced Functional Materials, Vol. 33, No. 3, 2023, pp. 2209080.
-
- 65. Xiong, Q., Zhou, X., Li, D., Ambrose, J.W. and Yeow, R.C., “An Amphibious Fully‐Soft Centimeter‐Scale Miniature Crawling Robot Powered by Electrohydraulic Fluid Kinetic Energy,” Advanced Science, Vol. 11, No. 14, 2024, pp. 2308033.
-
- 66. Leroy, E., Hinchet, R. and Shea, H., “Multimode hydraulically amplified electrostatic actuators for wearable haptics,” Advanced Materials, Vol. 32, No. 36, 2020, pp. 2002564.
-
- 67. Johnson, B.K., Naris, M., Sundaram, V., Volchko, A., Ly, K., Mitchell, S.K., Acome, E., Kellaris, N., Keplinger, C. and Correll, N., “A multifunctional soft robotic shape display with high-speed actuation, sensing, and control,” Nature Communications, Vol. 14, No. 1, 2023, pp. 4516.
-
- 68. Wang, T., Joo, H., Song, S., Hu, W., Keplinger, C. and Sitti, M., “A versatile jellyfish-like robotic platform for effective underwater propulsion and manipulation,” Science Advances, Vol. 9, No. 15, 2023, pp. eadg0292.
-
- 69. Mitchell, S.K., Wang, X., Acome, E., Martin, T., Ly, K., Kellaris, N., Venkata, V.G. and Keplinger, C., “An easy‐to‐implement toolkit to create versatile and high‐performance HASEL actuators for untethered soft robots," Advanced Science, Vol. 6, No. 14, 2019, pp. 1900178.
-
- 70. Gravert, S., Varini, E., Kazemipour, A., Michelis, M.Y., Buchner, T., Hinchet, R. and Katzschmann, R.K., “Low-voltage electrohydraulic actuators for untethered robotics,” Science Advances, Vol. 10, No. 1, 2024, pp. eadi9319.
-
 This Article
This Article
-
2024; 37(4): 247-264
Published on Aug 31, 2024
- 10.7234/composres.2024.37.4.247
- Received on Apr 8, 2024
- Revised on Jun 20, 2024
- Accepted on Jul 19, 2024
Services
Shared
Correspondence to
- Jaehwan Kim
-
School of Mechanical System Engineering, Kumoh National Institute of Technology
- E-mail: kimjh8729@kumoh.ac.kr
Gangnam Mirae Tower, Suite 601, 174 Saimdang-ro, Seocho-gu, Seoul 06627, South Korea
Tel: +82-2-598-1550 Fax: +82-2-598-1557 E-mail: composites@kscm.re.kr