





- Recent Advances on TENG-based Soft Robot Applications
Zhengbing Ding*, Dukhyun Choi*†
School of Mechanical Engineering, Sungkyunkwan University
- 정전 발전 기반 소프트 로봇 응용 최신 기술
성정빈* · 최덕현*†
This article is an open access article distributed under the terms of the Creative Commons Attribution Non-Commercial License (http://creativecommons.org/licenses/by-nc/4.0) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
As an emerging power generation technology, triboelectric nanogenerators (TENGs) have received increasing attention due to their boundless promise in energy harvesting and self-powered sensing applications. The recent rise of soft robotics has sparked widespread enthusiasm for developing flexible and soft sensors and actuators. TENGs have been regarded as promising power sources for driving actuators and self-powered sensors, providing a unique approach for the development of soft robots with soft sensors and actuators. In this review, TENG-based soft robots with different morphologies and different functions are introduced. Among them, the design of biomimetic soft robots that imitate the structure, surface morphology, material properties, and sensing/generating mechanisms of nature has greatly benefited in improving the performance of TENGs. In addition, various bionic soft robots have been well improved compared to previous driving methods due to the simple structure, self-powering characteristics, and tunable output of TENGs. Furthermore, we provide a comprehensive review of various studies within specific areas of TENG-enabled soft robotics applications. We first explore various recently developed TENG-based soft robots and a comparative analysis of various device structures, surface morphologies, and nature-inspired materials, and the resulting improvements in TENG performance. Various ubiquitous sensing principles and generation mechanisms used in nature and their analogous artificial TENG designs are demonstrated. Finally, biomimetic applications of TENG enabled in tactile displays as well as in wearable devices, artificial electronic skin and other devices are discussed. System designs, challenges and prospects of TENGs-based sensing and actuation devices in the practical application of soft robotics are analyzed
마찰전기 나노발전기(이하 TENG)의 새로운 발전 기술은 에너지 수집 및 자가 전력 공급 감지 응용 분야의 긍정적 전망으로 인해 점점 더 많은 관심을 받고 있다. 또한 최근 소프트로봇의 부상은 플렉시블과 소프트센서, 액추에이터 개발에 대한 폭넓은 관심을 불러 일으키고 있다. TENG는 액추에이터와 자가 전력 공급 센서를 구동하는 유망한 전원으로 간주되어 소프트웨어 로봇, 소프트 센서 및 액추에이터 개발을 위한 독창적인 방법을 제공한다. 이 리뷰에서는 TENG를 기반으로 다양한 형태와 기능을 가진 소프트웨어 로봇을 소개하려 한다. 그 중 자연계의 구조, 표면 형태, 재료 특성과 센싱/발전 메커니즘을 모방한 바이오닉 소프트 로봇의 설계는 TENG 성능 향상에 큰 도움이 되었다. 또한 다양한 바이오닉 소프트 로봇은 TENG의 간단한 구조, 자체 전력 공급 특성 및 조정 가능한 출력으로 인해 이전 구동 방식보다 향상되었다. 그리하여 이 리뷰에서는 TENG가 활성화한 소프트 로봇 응용의 특정 핵심 영역에서 다양한 연구를 종합적으로 검토하려 한다. 리뷰를 요약하자면 먼저 최근 개발된 다양한 TENG 기반 소프트웨어 로봇을 정리하고 다양한 장비 구조, 표면 형태 및 자연적으로 영감을 받은 재료를 비교 분석하여 그에 따른 TENG 성능 개선을 수행한다. 자연계에 사용되는 다양한 유비쿼터스 감지 원리와 발전 메커니즘 및 유사한 인공 TENG 설계가 확인되었고 촉각 디스플레이 및 웨어러블 기기, 인공 전자 피부 등의 기기에 TENG를 활성화하는 바이오닉 응용에 대해 논의한다. 마지막으로 TENG 기반 센서 및 구동 장비의 로봇 실제 적용에 대한 발전 기회, 도전 및 미래 전망을 분석한다
Keywords: 정전 발전기(Triboelectric nanogenerators), 소프트 로봇(Soft Robitics), 자가발전(Self-powered), 전자 피부(Electronic skin), 웨어러블(Wearable)
최근 기술의 고도화와 함께 다양한 방법으로 정전기를 활용할 수 있는 원리에 대한 이해도가 높아지고 있다[1]. 정전기는 마찰 전기라고 부르며 이는 두 가지 다른 물질의 표면이 서로 접촉하면 제한된 양의 전하가 표면을 통해 전달되는 현상을 말한다. 일반적으로 전하 이동은 한 표면의 고에너지 상태(valence band)에서 다른 표면의 점유되지 않은 저에너지 상태(conduction band)로의 전자의 열역학적 운동에 의해 발생한다. 즉, 접촉 전위차(Contact Potential Difference)가 이 움직임을 구동한다[2,3]. Triboelectric nanogenerators (TENGs)는 2012년 조지아 공대 Zhonglin Wang 교수팀이 마찰 전기와 정전기 유도의 결합 작용을 이용해 기계 에너지를 전기에너지로 변환하는 소자이다[4-7]. TENG는 작업 과정에서 마찰 전극성이 다른 두 재료가 접촉한 후 표면에 전하를 발생시킨다. 두 물질이 분리되면 전위차가 발생하여 외부 회로에 전류가 생성된다[8-10]. 지금까지 개발된 정전 나노 발전기의 표면 전력 밀도는 500 W/m2, 전력 밀도는 15 MV/m3에 달하며, 최고 순간 에너지 전환 효율은 약 70%에 달한다[11]. 이 새로운 유형의 발전기는 기계적 진동, 인체 활동, 풍력 에너지, 수력 에너지 및 음파 에너지 등 다양한 형태의 기계적 에너지를 수집하는 데 사용할 수 있으며 개인 전자 제품, 환경 모니터링, 의료 기기 등에 자체 전력 공급 및 자체 구동 장비를 제공할 수 있고 능동형 센서로서 상업적, 실용적 잠재력이 크다[12-16]. TENG는 마찰 전기와 정전기 유도의 결합을 통해 다양한 상황에서 버려지는 기계적 에너지를 전기 에너지로 변환한다. 일반적으로 TENG의 작동 모드는 접촉식, 슬라이딩식, 단일 전극식 및 격벽식의 4가지 유형으로 나눈다. 다양한 발전 모드를 통해 나노 발전기를 마찰시켜 다양한 형태의 기계적 에너지를 수집하고 이를 전기에너지로 변환할 수 있다[17,18].
최근 몇 년 동안 소프트 로봇은 큰 변형, 높은 민첩성, 우수한 유연성 및 우수한 환경 적응력과 같은 독특한 장점으로 인해 많은 관심을 받고 있다. 지금까지 소프트 로봇 시스템의 개발은 모션, 조종 및 인간-기계 상호 작용에 대한 다양한 응용 프로그램과 관련이 있다. 소프트 로봇과 기계는 소프트 바이오 재료 및 인체 조직에 필적하는 탄성 계수(kPa-MPa)를 갖는 고 유연 재료를 사용하도록 설계된 소프트 시스템으로 간주된다[19]. 이러한 시스템은 인간 피부의 특성을 복제하고 탄력을 제공할 수 있는 높은 기계적 유연성과 신축성을 나타내기 때문에 관심이 높다. 이러한 기술 개발에 대한 요구는 단순한 추세가 아니며, 과학계는 인간 친화적인 소프트 로봇의 개발을 위해 현재까지 입증된 다양한 기술을 통해 돌파구를 찾고 있다. 산업용 로봇은 완제품 생산의 품질을 보장할 수 있는 강체 메커니즘을 기반으로 하는 빠르고 정확한 시스템이다. 반면, 소프트 로봇의 개발 성패는 제조 시스템의 통합과 완전한 자율 구동 방식에 달려 있다. 소프트 로봇 시스템이 잠재력을 발휘하려면 센서, 구동 및 전원 공급과 같은 기본 기술이 완전히 통합되고 조정되어야 한다.
전기 연결없이 장시간 작동할 수 있는 실용적인 자율 소프트 로봇 시스템을 만들기 위해서는 최소한의 전력을 소비하면서 작동하는 능력이 중요하다. 따라서 이상적으로 소프트 센서는 자극에 대한 자체 전기 신호를 생성하기 때문에 자체 전원을 공급해야 한다. 마찬가지로 소프트 액추에이터 와 이펙터는 환경 에너지(기계적 움직임, 변형률 또는 열 등)를 수집하여 소프트 로봇의 작동을 계속 지원할 가능성이 있어야 한다. 소프트 로봇, 마찰 전기/압전 기반 소프트 에너지 수집기[20], 전자 피부[21], 웨어러블 기기[22]및 생체 모방 소프트 로봇에 대한 다양한 연구 기술이 소개된 사례가 있다. 본 리뷰에서는 미래의 소프트 로봇용 마찰 전기 TENG 기반 소프트 기기에 초점을 두고 있다. 이 리뷰를 통해 소프트 로봇과 기계의 자가 전력 공급 센서 및 에너지 수집기로 사용되는 소프트 로봇에서 TENG의 현재 활용 기술 수준을 요약하는 것을 목표로 하며, 소프트 로봇 시스템에 어느 정도 다기능성을 부여하여 시스템의 성능과 효율성을 향상시키기 위한 노력도 논의할 것이다. 마지막으로 TENG 기반 소프트웨어 로봇 응용 프로그램의 향후 연구 전망에 대해 논의하고자 한다.
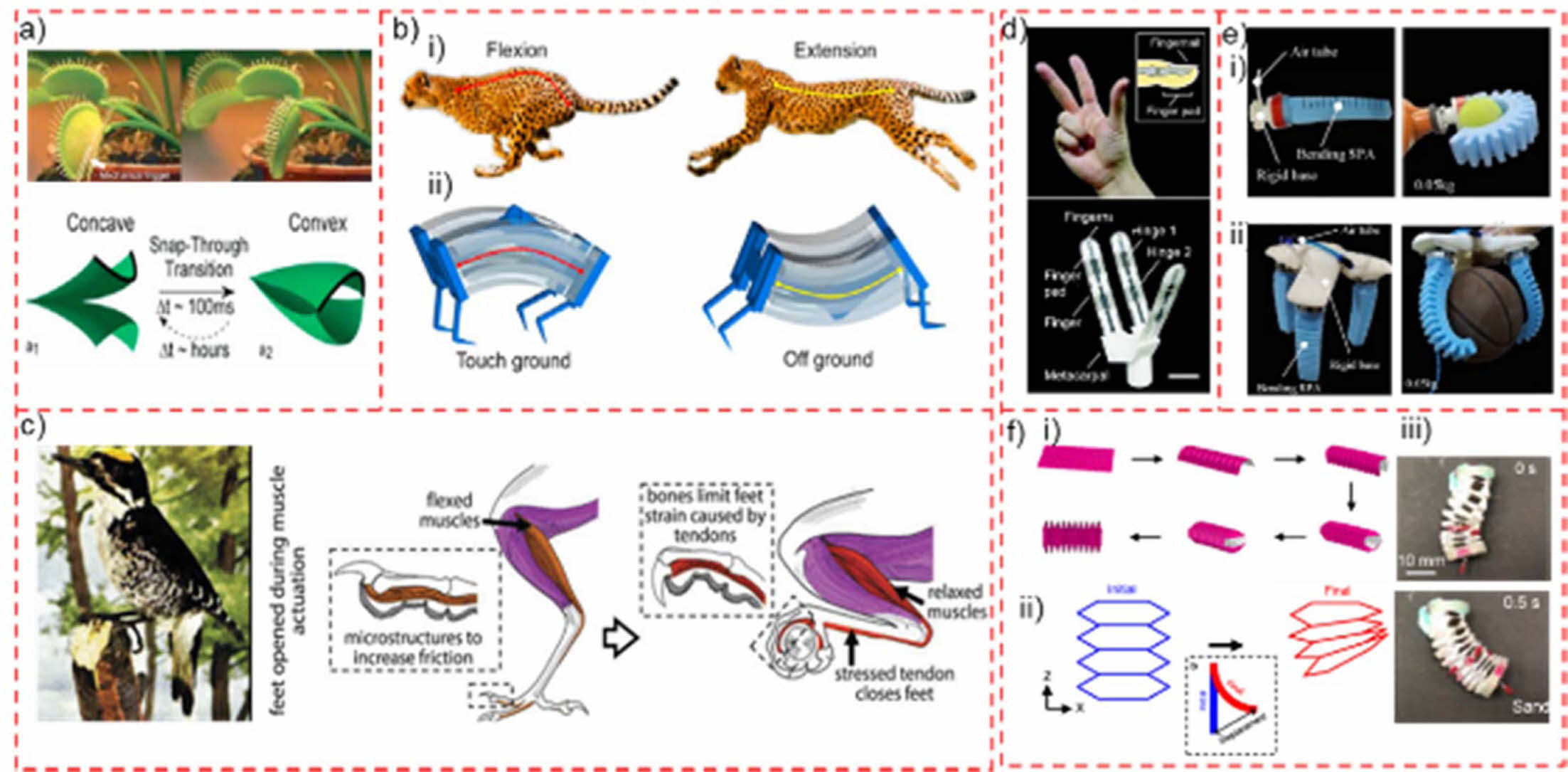
오랫동안 자연의 식물학, 생물학은 엔지니어가 더 강력한 기계를 만드는 데 영감을 주었다. 어떤 식물은 자신의 위치와 자세를 조정하고 환경 변화에 지속적으로 적응할 수 있는 반면, 어떤 식물은 환경 변화에 영향을 받지 않고 강한 안정성을 보여 새로운 기술의 설계 및 개발에 중요한 영감 모델이 되었다. 생물학적 시스템이 자주 사용하는 특징인 일부 유기체의 유연성과 신체의 순응성은 단순함을 추구하는 경향이 있으며 환경과의 상호 작용에서 감소된 복잡성을 나타낸다Fig. 1(Fig. 2a-c). 자연 생물 시스템을 연구하면서 얻은 몇 가지 경험적 교훈은 마침내 우리와 다른 사람들이 소프트 로봇이라고 부르는 새로운 기계의 정의를 형성했다. 소프트 로봇의 몸을 구동할 수 있는 방법은 여러 가지가 있다(Fig. 2d-f). 일반적인 구동 방식은 주로 가변 길이 힘줄(주로 형상 기억 합금 드라이브의 형태[42])을 소프트 부분에 삽입하여 구현하는 데, 예를 들어 SMA 기반 3개의 로봇 손가락으로 구성된 소프트 그립(Fig. 2d)으로 표현되며, 이러한 로봇 손가락은 다양한 물체를 적응하고 효과적으로 잡는 데 사용된다. 로봇 응용 프로그램에 사용되는 고성능 소프트 에어 액추에이터(Fig. 2e)는 최대 400 kPa의 공기압을 견딜 수 있고 소프트 클램프[43] 및 연속 구부림 모듈에 성공적으로 적용되었으며 손톱형 소프트 클램프는 무게가 5 kg에 달하는 물체를 잡을 수 있다. 종이접기 기술에 의해 영감을 받은 자기 구동 소프트 로봇(Fig. 2f)은 종이접기 구조의 높은 수축성과 형상 변환 특성으로 인해[44] 맞춤형 활성 재료 조립을 통해 다양한 운동(연동, 롤링 및 회전)을 수행할 수 있다. 소프트 로봇이 직면한 큰 도전은 구동에 사용되는 확장 가능한 휴대용 전원이다. 공압 액추에이터의 경우 기존 유체 동력원보다 부드럽지 않고 일반적으로 크고 무겁다. SMA는 반복 작동을 달성하기 위해 수동으로 재프로그래밍해야 하며 재료 비용이 많이 든다. 현재 개발된 일부 소프트웨어 로봇의 소프트 드라이브는 완전한 호환성과 독립성을 완벽하게 충족할 수 없다. 이러한 재료 각각은 특정 범위의 응용 분야에 사용될 것으로 예상되는 경우를 제외하고 장점과 단점이 명확하게 보인다.
|
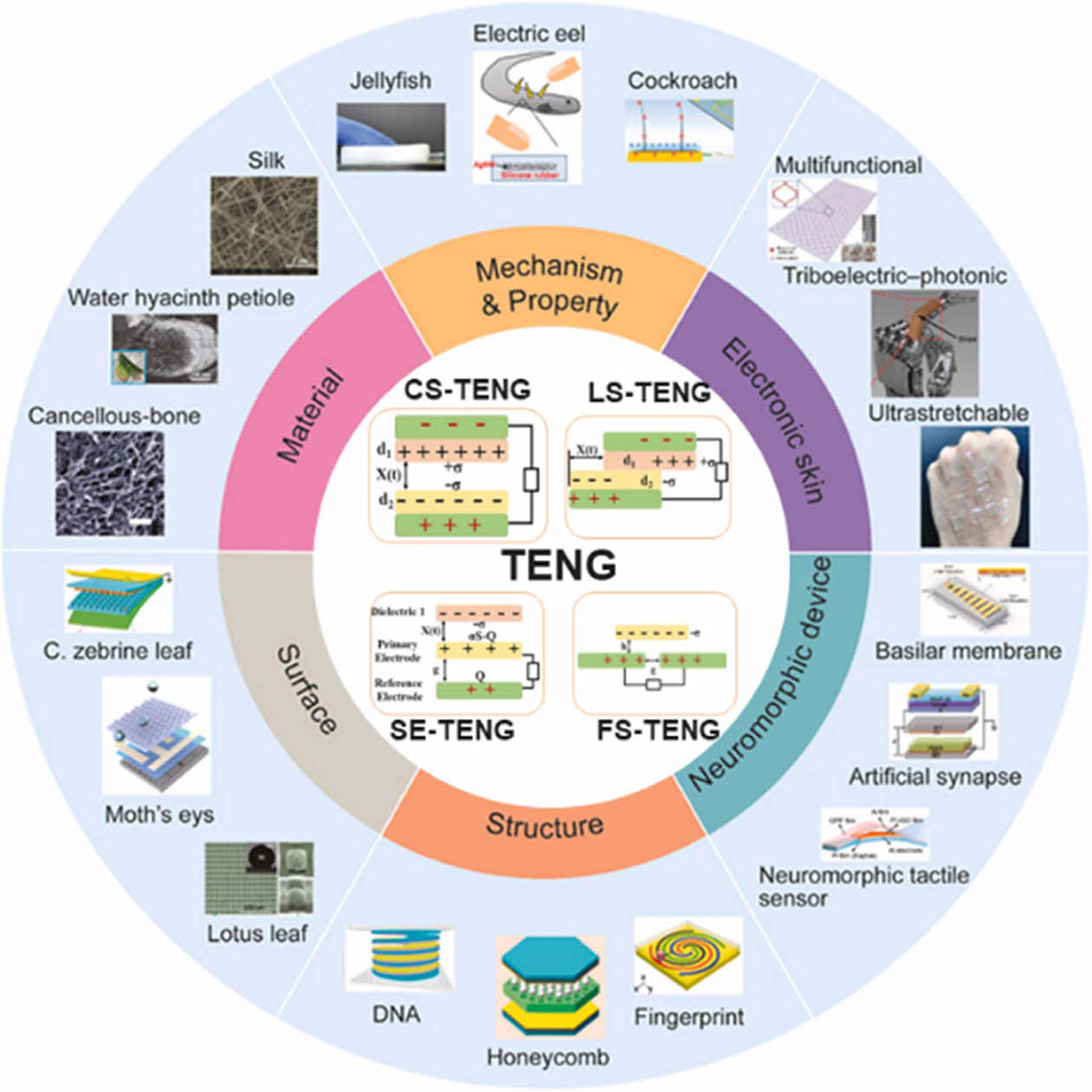
Fig. 1 The latest progress of soft robots based on four working modes of triboelectric effect-based electronics. Working mechanism of the device in vertical contact-separation mode, planer sliding mode, single-electrode mode, and freestanding friction layer mode. Reproduced with permission from Ref. [23]. Copyright 2021, Wiley-VCH. Bioinspired designs and soft robotics applications of triboelectric nanogenerators. Reproduced with permission from Ref. [24]. Copyright 2018, Elsevier. “Honeycomb”. Reproduced with permission from Ref. [25]. Copyright 2019, Wiley-VCH. “DNA”. Reproduced with permission from Ref. [26]. Copyright 2020, Wiley-VCH. “Lotus leaf”. Reproduced with permission from Ref. [27]. Copyright 2019, Elsevier. “Moth’s eyes”. Reproduced with permission from Ref. [28]. Copyright 2019, Elsevier. “C. zebrine leaf”. Reproduced with permission from Ref. [29]. Copyright 2019, Wiley-VCH. “Cancellous-bone”. Reproduced with permission from Ref. [30]. Copyright 2019, Elsevier. “Water hyacinth petiole”. Reproduced with permission from Ref. [31]. Copyright 2017, Elsevier Ltd. “Silk”. Reproduced with permission from Ref. [32]. Copyright 2016, Wiley-VCH. “Jellyfish”. Reproduced with permission from Ref. [33]. Copyright 2017, Elsevier. “Electric eel”. Reproduced with permission from Ref. [34]. Copyright 2016, Wiley-VCH. “Cockroach”. Reproduced with permission from Ref. [35]. Copyright 2019, Wiley-VCH. “Multifunctional”. Reproduced with permission from Ref. [36]. Copyright 2018, Wiley-VCH. “Triboelectric-photonic”. Reproduced with permission from Ref. [37]. Copyright 2018, Wiley-VCH. “Ultra stretchable”. Reproduced with permission from Ref. [38]. Copyright 2017, American Association for the Advancement of Science. “Basilar membrane”. Reproduced with permission from Ref. [39]. Copyright 2016, Wiley-VCH. “Artificial synapse”. Reproduced with permission from Ref. [40]. Copyright 2019, Elsevier. “Neuromorphic tactile sensor”. Reproduced with permission from Ref. [41]. Copyright 2020, American Chemical Society |
|
Fig. 2 Soft-actuator robots with different actuation methods inspired by the actuation systems of animals and plants in nature. a) Snap-through of the Venus flytrap leaves from concave (a1) to convex (a2) occurs through the onset of an elastic instability. Reproduced with permission from Ref. [45]. Copyright 2017, Springer Nature. b) Fast release in fully soft and hybrid pneumatic actuators enabled by stored elastic energy. Reproduced with permission from Ref. [46]. Copyright 2020, Science. c) Soft- actuators inspired by muscle-tissue movement. Reproduced with permission from Ref. [47]. Copyright 2016, ASME International. d) Shape Memory Alloy-Based Soft Gripper with Variable Stiffness for Compliant and Effective Grasping. Reproduced with permission from Ref. [42]. Copyright 2020, Wiley‐VCH. e) High Force Soft Pneumatic Actuators for Robotic Applications. (i) Components of a tentacle-type soft gripper. (ii) Components of a claw-type soft gripper. Reproduced with permission from Ref. [43]. Copyright 2020, Elsevier. (f) The soft robot consists of a paper-based backbone with iron sheets (paramagnetic) attached. Different configurations of the iron sheets were assembled and their influences in loco motions were tested by actuating with a permanent magnet (ferromagnetic). (i) Steps involved in the folding of the origami robot. (ii) Schematic showing the actuation mechanism of turning motion of the soft robot actuated by a permanent magnet. Schematic inside showing the displacement in the body of the robot during turning motion. (iii) Performance of the turning motion. Reproduced with permission from Ref. [44]. Copyright 2021, MDPI |
3.1 Bionic crawling soft robot
소프트 로봇은 움직임을 모니터링하고 감지하기 위해 센서가 필요하며[48], 특히 생체 모방 크롤러 로봇에서 특정 고정밀 작업을 완료하기 위해 서로 다른 기능을 가진 여러 센서가 필요하다. 그러나 기존의 전위차계 및 인코더와 같은 센서는 자유도가 높고 변형 비선형성이 강한 소프트 로봇의 요구 사항을 충족할 수 없어 소프트 로봇 분야에서의 응용을 막고 있다. 따라서 소프트 로봇의 다중 모션 형태 감지를 실현하기 위해 유연하고 확장 가능한 다기능 센서가 필요하다. 소프트 로봇 모션 감지 및 센싱에 일반적으로 사용되는 기존 방법에는 광전 감지[49,50], 전자기 효과 및 전도성 나노복합체가[51,52] 포함되지만 이러한 방법의 적용은 나노복합체의 비선형성 또는 크리프와 같은 결함으로 인해 제한된다. 이러한 한계를 극복하기 위해 TENG는 구조가 간단하고 비용이 저렴하며 재료 범위가 넓기 때문에(예를 들어 강성과 유연성이 높은 재료) 압력, 촉각, 운동 또는 인간-기계 인터페이스 센서로[53-60] 널리 사용되며 직접 출력 신호에 기초하여 운동 과정을 특성화하는 능력으로 사용된다.
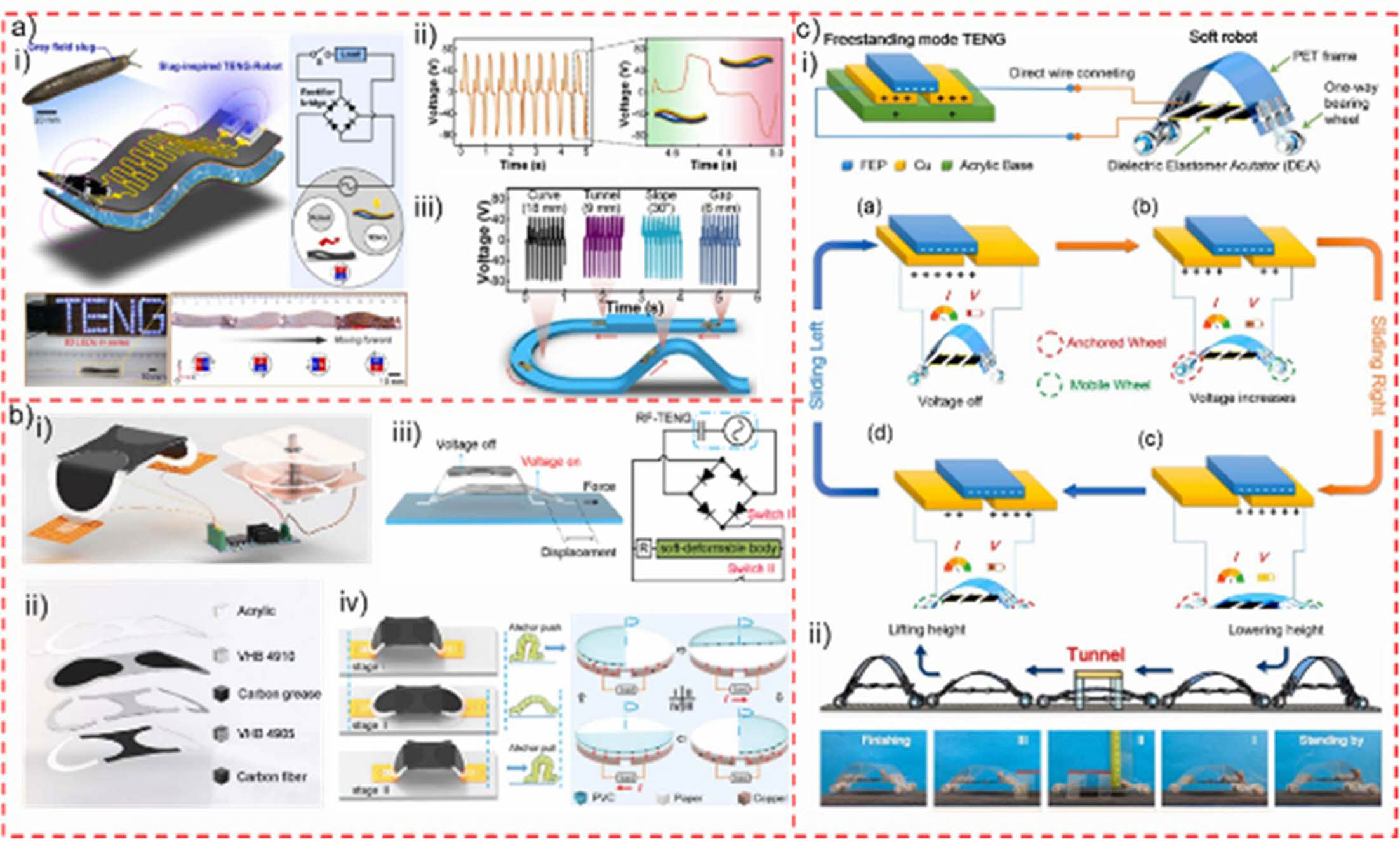
Peng 등(2022)은 Slug-inspired TENG-Robot으로 명명된 TENG와 완전히 통합된 Slug-inspired TENG-Robot으로, 차량 탑재 센서 및 자가 전력 충전용 Slug-soft robot을 개발했다(Fig. 3a)[61]. TENG-Robot은 회전 자기장의 구속되지 않은 구동 하에 꼬리에서 머리까지 주기적인 신체 변동을 통해 다양한 지형(예: 평면, 경사, 간극 및 터널)에서 전방 이동을 생성하는 일련의 페달 파동을 생성한다. 동시에 TENG-Robot은 이 운동 동안 폐쇄 접촉 분리 모드에서 자가 변환 유도 마찰 전기를 수집한다. TENG-Robot은 회전 자기장에 의해 구동되는 민달팽이 모양의 걸음걸이로 평면, 경사, 간극 및 터널과 같은 다양한 지형에서 기어다니고, 오르고, 방향을 바꿀 수 있다. TENG-Robot은 제약없이 구동되며 완전하게 유연하고 고도로 통합되어 전례 없는 적응성, 민첩성 및 다기능성을 보여준다. TENG-Robot의 크롤링 속도는 약 30 mm/s이며 Fig. 3a-i와 같이 크롤링 동안 83개의 LED가 동시에 켜졌다. 이는 Slug-inspired TENG-Robot이 우수한 운동 성능과 마찰 대전 능력을 가지고 있음을 잘 보여준다. TENG-Robot의 개방 회로 전압(Voc)을 측정하여 70 mT의 회전 자기장 강도와 2 Hz의 주파수에서 TENG에 의해 생성된 Voc 및 Isc의 피크가 160 V에 도달할 수 있음을 발견했다(Fig. 3a-ii). Fig. 3a-ii의 그림은 개방 회로 전압 Voc 회전 자기장에 의해 구동되는 TENG-Robot을 한 주기 동안 보여준다. TENG-Robot의 처음부터 끝까지 접촉 분리하는 거동은 양전하를 생성하여 파형 전압을 출력한다. 70 mT와 8 Hz의 자기장에 의해 구동되는 TENG-Robot은 Fig. 3a-ii와 같이 간극, 터널, 곡선 및 경사 등 복잡한 지형에서 기어다니고 회전하는 과정에서 마찰 전기를 안정적으로 출력할 수 있다.
Liu 등(2022)은 주로 두 가지 전기 반응 물질로 구성된 자벌레에서 영감을 받아 소프트 로봇과 TENG를 결합한 마찰 전기 소프트 로봇 Triboelectric Soft Robot (TESR) 시스템의 개념을 제안했다[19]. Fig. 3b-i는 생체 모방 구조를 가진 TESR이 하나의 소프트 변형 가능한 본체와 2개의 triboelectric adhesion feet (TAF)로 구성된 시스템을 보여준다. Rotary freestanding triboelectric nanogenerator (RF-TENG)의 지원을 받아 부드러운 바디가 변형되고 두 TAF가 제어된 접착력을 생성한다. 연성 변형에 대한 자세한 구조 정보는 Fig. 3-ii에 의해 시각화된다. RF-TENG 구동 소프트 로봇을 연구하기 위해 소프트 변형 및 TAF를 포함한 TESR의 기본 특성을 테스트하였다. Fig. 3b-iii에서 볼 수 있듯이 연성 변형체는 전압이 없는 초기 길이를 갖는다. 고압의 작용으로 연성 변형체는 특수 프레임의 구속 하에 변형되어 힘과 변위를 생성한다. 힘과 전압, 변위와 전압 사이의 관계를 정량화하기 위해 구동 회로의 설계도 Fig. 3b-iii에 나와 있다. 자벌레 운동 원리에 기반한 TESR 크롤링에는 두 가지 과정이 포함된다(Fig. 3b-iv 참조). 첫 번째 과정은 자벌레의 앵커링 운동과 유사하다. 이 단계에서 출력 I과 출력 II에 의해 공급되는 고전압은 각각 연성변형기와 왼발에 전달된다. 결과적으로, 왼발과 기판의 밀착성은 오른발과 기판의 밀착성보다 높다. 그 후, 부드러운 변형체가 늘어나 오른발을 앞으로 밀어낸다(Fig. 3b-iv, 1단계~2단계). 두 번째 과정은 자벌레의 앵커링 운동과 유사하다. 이 시스템에서 출력 II가 제공하는 고압은 왼쪽 발에서 오른쪽으로 전환되고 출력 I은 차단되어 발과 기판 사이의 접착력이 단계 I와 반대가 된다. 따라서 소프트-가변형의 신체 수축은 TESR을 앞으로 기어가게 한다(Fig. 3b-iv, 단계 III에서 단계 III).
또한 Sun 등(2022)은 TENG 전원 공급 및 제어에 적합한 소프트 로봇 TENG-Bot을 제안했다. 로봇 시스템에 유연한 구배를 설정하여 TENG가 추가 제어 패널 없이 직접 전원을 공급하고 제어할 수 있는 선형 실시간 전기 통합 로봇 시스템을 구현한다(Fig. 3c)[62]. 독립적인 모드인 TENG를 설계하여 소프트 로봇에 연결한다. 독립형 TENG에서 이동 부품은 고정된 두 개의 기판에서 자유롭게 미끄러질 수 있다. 이동층은 무전극이기 때문에 정전기 차폐 효과를 제거하고 전하 전달 효율을 85%까지[63] 높게 만든다. 그리고 발생된 고압을 고정기판 전극에 연결된 전선을 통해 소프트 로봇에 전달한다. 다음으로 TENG가 소프트 로봇에 TENG-Bot으로 어떻게 동력을 제공하는지 보여준다. (a) 슬라이딩 시작 시 TENG는 중성 상태이며 전하를 출력하지 않는다. 소프트웨어 로봇의 전원이 꺼진다. (b) TENG가 오른쪽으로 더 미끄러지면 전하가 DEA에 축적되어 전압이 증가하고 DEA가 약간 연장된다. 단방향 베어링 휠은 소프트 로봇이 기어 다닐 수 있도록 하며 DEA의 신장은 앵커 휠에 의해 유지된다. (c) 슬라이드가 경계에 가까워지면 전하량이 최대화되고 전압이 최대치로 비스듬히 상승한다. DEA가 최대 변형률에 도달한다. (d) TENG가 오른쪽 끝에서 왼쪽으로 미끄러지면 전압이 감소하고 DEA가 수축된다. Fig. 3c-ii는 로봇이 좁은 터널(폭 70 mm × 길이 30 mm × 높이 20 mm)을 통과하는 방법을 보여준다. 일반적으로 TENG는 생체 모방 소프트웨어 크롤러 로봇에서 자체 전력 공급, 전력 저장 및 외부 전기 장비 방전을 위해 설계되었다. 기존 소프트 로봇에 유망하고 간편하며 안전한 전원을 제공하고 기존 기술을 기반으로 TENG는 응용의 다양성을 풍부하게 할 것이다.
3.2 Soft Gripper
로봇 손은 수년 동안 개발되어 왔으며 그 중 소프트 그립은 특히 집중적인 인간-기계 상호 작용 또는 환경-로봇 상호 작용을 포함하는 응용 분야에서 학계와 산업계의 주목을 받고 있다. 부드러운 그립은 연속적으로 변형될 수 있으며 인체 및 깨지기 쉬운 물체와 손상 없이 안전하고 부드럽게 상호 작용한다. 또한 고유한 유연성으로 인해 이 그리퍼는 단순한 제어 전략(형태 계산을 사용하여)을 사용하여 복잡한 기하학적 물체와 쉽게 보형 접촉을 형성할 수 있어 기존 그리퍼보다 효율적이다. Tao 등(2020)은 두 개의 TENG 센서를 통합하는 소프트 로봇 감각 그립 시스템을 제안하고 연구했다(Fig. 4a)[64]. 개발된 패턴 전극 촉각(Tactile) TENG(T-TENG) 센서가 있는 센서 시스템은 소프트 그립의 슬라이딩, 접촉 위치 및 그립 모드를 감지할 수 있다. 소프트 액추에이터의 굽힘 각도는 길이(Length) TENG(L-TENG) 센서로 측정되며, 양전 기어 톱니바퀴와 음전 재료의 접촉 분리에 의해 신호가 생성된다. 다음으로 피드백 기능을 구현하기 위해 TENG 센서를 통합한 3차원(3D) 인쇄를 통해 액추에이터 소프트 그리퍼를 제작하였다. 기계 학습 기술을 이용해 데이터 분석 시연에 성공한 상태를 감지하는 손잡이가 물체를 식별해 추출한 뒤의 숫자를 구축하고 시연은 가상 현실(Virtual Reality) 환경에서 사이버 공간 즉 VR이 만든 이 같은 디지털 정보 조작을 반복하다. 머신러닝 기술을 이용한 데이터 분석, 그립 상태 감지, 물체 인식 실현을 성공적으로 시연하고 디지털 시스템을 구축하여 VR 환경, 즉 사이버 공간에서 위의 조작에 대한 반복적인 디지털 정보를 생성한다.
Chen 등(2020)은 TENG 기반 자체 전력 공급 센서가 있는 공압 소프트 액추에이터Pneumatic soft actuator (PSA)를 개발했다(Fig. 4b). 여기서, TENG는 구성된 자체 수용 센서로서 PSA에 통합된다[65]. PSA의 각 챔버에는 전도성 스폰지 조각이 배치되어 단일 전극 TENG을 형성하였다. Fig. 4b-i는 원래 평평한 상태와 압력을 받은 구부러진 상태에서 감지된 PSA를 보여준다. PSA는 다양한 크기 또는 무게의 물체를 조작할 수 있는 범용 클램프로 조립된다. 센서 PSA는 도움을 제공하기 위해 손에 착용할 수 있다(Fig. 4b-ii). Fig. 4b-iii는 소프트 그립의 작동 원리를 보여준다. 챔버의 내벽과 스펀지 전극은 함께 단일 전극 TENG를 형성한다. 접촉 상태에서 실리콘 고무는 전극에서 전자를 얻고 전극에는 동일한 양전하가 포함되어 있다. 팽창 상태에서 PSA는 압축 공기에 의해 구부러진다. 음전하를 띤 실리콘 수지 챔버는 팽창하여 일반적으로 전극으로부터 분리된다. 양전하는 평형 전위를 상승시키기 위해 전극으로 유출된다. 공기를 뺀 상태에서 챔버는 천천히 원래의 모양으로 수축한다. Fig. 4b-iv는 PSA의 굽힘 각도가 약 65°인 작은 컵(직경 30 mm)을 잡을 수 있는 클램프를 보여준다.
Chen 등(2020)은 케이블 구동 메커니즘과 호환되는 TENG 센서를 결합하여 빠른 응답, 정확한 제어, 자체 공급 압력 및 구부러진 소프트 어시스턴트 브레이크를 실현할 수 있는 지능형 케이블 구동, 핑거형 및 소프트 액추에이터 를 보고하였다[66]. 인간의 손가락에서 영감을 받아 소프트 액추에이터 본체는 곡선 및 복잡한 기하학적 대상과의 보형 접촉을 용이하게 하기 위해 3개의 45° 삼각형 절개로 분리된 4개의 탄성 세그먼트로 설계되었다(Fig. 4c). Fig. 4c-i, 4c-ii는 스마트 그랩이 볼 케이스를 잡을 수 있음을 보여준다. 부드러운 손가락이 구부러지고 공에 가까워지면 TS-2가 먼저 공에 닿고 TS-1이 그 다음 TS-3이 된다. 물체와 그랩의 상대적 위치와 크기는 이 접촉 순서에 영향을 미칠 수 있다.
Li 등(2020)은 TENG를 증기 반응 PDMS와 결합하여 이중 자극 액추에이터를 설정할 수 있으며, 이 중 에탄올 증기는 변형 범위를 제어하는 데 사용할 수 있으며 TENG는 충분한 구동력을 제공할 수 있다(Fig. 4d)[67]. 또 다른 TENG 및 에탄올 증기 반응 PDMS 필름 기반 이중 자극 플렉시블 그리퍼를 설계했다. 그리퍼의 그립 동작은 TENG에 의해 구동되며, TENG에 의해 발생되는 고전압은 그리퍼의 두 손가락 사이에 정전기를 발생시켜 그리퍼 소자를 개폐할 수 있는 구동력을 제공한다.
3.3 Tactile communicators
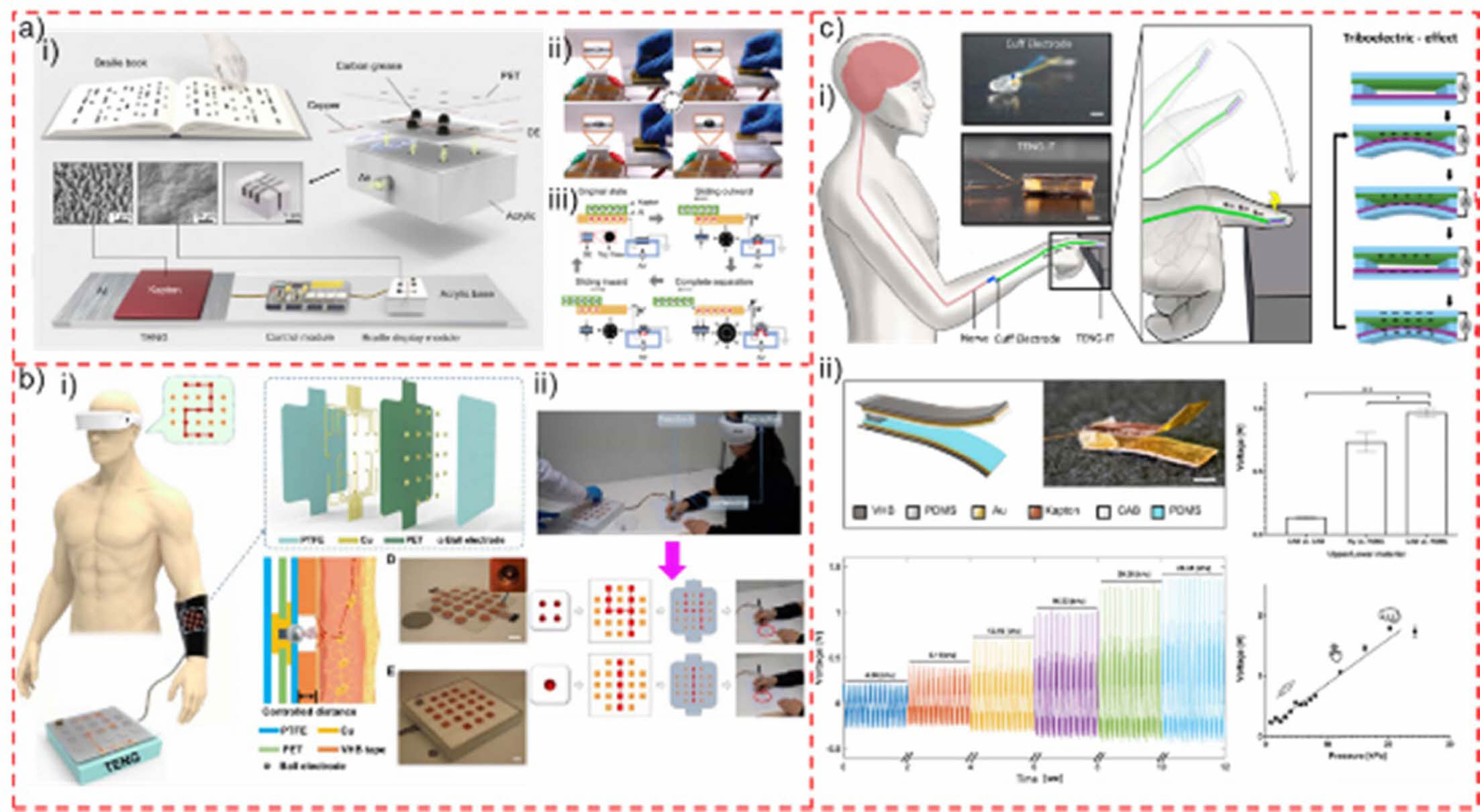
기계적 에너지를 전기 에너지로 변환할 수 있는 TENG는 에너지 수집, 센서, 의료 장비, 재활 등을 포함한 다양한 분야에서 사용되었다[68-70]. 고전압(kV 진폭)과 저전류(μA 진폭)의 일부 흥미로운 출력 특성이 연구자들의 관심을 끌고 있다는 점은 주목할 가치가 있다[71]. 또한 구조가 간단하고 제조가 용이하며 비용 효율이 좋은 기타 장점은 TENG를 편리하고 안전한 고압 전원으로 사용하기에 적합하다. Qu 등(2020)은 TENG 및 Dielectric elastomer (DE) 멤브레인 기반 리프레시 가능한 점자 디스플레이 시스템 Refreshable Braille display system (RBDS)을 제안했으며(Fig. 5a), Fig. 5a-i는 TENG의 출력 성능을 향상시키기 위해 유도 결합 플라즈마Inductively coupled plasma (ICP) 반응 이온 에칭을 사용하여 Kapton 멤브레인 표면을 수정했다[72]. 이는 3 kV를 초과하는 TENG 출력 전압을 구현할 수 있다. Dielectric elastomer dot (DED)의 상부 및 하부에는 탄소 그리스로 이루어진 플렉시블 전극이 도포되어 있다. 탄소 그리스 전극은 금속 전극과 비교하여 균열 없이 DE 필름의 변형을 잘 따를 수 있다. DE 필름 전체에 6개의 구멍이 뚫린 Polyester (PET) 시트를 부착하여 작동 효과를 높이고 점자 유닛을 보호한다. Kapton 슬라이드를 알루미늄 호일 위로 슬라이딩할 때 DED의 형태도 그에 따라 변화하였다(Fig. 5a-ii). TENG 구동 DED의 작동 메커니즘은 Fig. 5a-iii에 나와 있다. 원래 상태에서 Kapton 필름과 알루미늄 호일은 완전히 겹치고 밀착된다. 마찰 전기 급수에 따라 Kapton은 Aluminum (Al)보다 전기 음성도가 더 강하다. 따라서 슬라이딩 과정에서 전자가 Al에서 Kapton으로 주입되어 Kapton 필름 표면에 양전하가 축적되고 Al 호일 표면에 등가 음전하가 축적된다.
Shi 등(2020)은 자가 동력, 무통, 고감도 전기합동 Electro-tactile (ET) 시스템을 제안하였다(Fig. 5b)[73]. Fig. 5b-i는 제안된 ET 시스템의 작동 원리, 작동 과정 및 구조적 구성을 설명한다. TENG의 터치 및 슬라이딩 동작은 정전기 신호로 직접 변환될 수 있으며, 이러한 신호는 사람의 피부에 통합된 ET 인터페이스로 동시에 전도된다. ET 인터페이스 상의 각각의 구형 전극은 TENG 어레이 내의 특정 TENG 유닛에 연결되며, TENG 유닛이 제공하는 신호는 구형 전극의 피부로의 정전기 방전을 유발할 수 있다. 마지막으로, 이러한 전기적 자극을 통해 특정 패턴을 갖는 가상 촉각 자극이 피부에 재현된다. Fig. 5b-ii는 TENG가 서로 다른 장소에 있는 사람들이 가상 햅틱 통신을 경험할 수 있는 가교 역할을 할 수 있는 가상 상호 작용 기술로서 이 ET 시스템의 가능한 응용을 요약한다. 실험 대상자들은 TENG 유도 ET 자극에 기초하여 TENG 표면에 난수가 기록되었을 때 정확한 피드백을 줄 수 있었다. 이 ET 시스템은 ET 자극을 통해 가상 신호를 햅틱으로 변환할 수 있어 청각과 시각 자극을 결합해 격리 병동이나 교도소 방문 등 비접촉 통신 시 햅틱 경험을 높일 수 있는 완벽한 VR 시스템을 구축할 것으로 기대된다.
마지막으로 Shlomy 등(2021)은 상대적으로 간단하고 자가 전력 공급, 생체 적합성, 민감하고 유연한 장치로 TENG의 사용을 제안, 제조 및 시연했다[74]. 이 통합된 촉각 TENG(TENG-IT) 장치는 피하에 이식되고 촉각 압력을 전위로 변환하여 커프 전극을 통해 건강한 감각 신경으로 전달되어 촉각을 모방하도록 자극된다(Fig. 5c). Fig. 5c-i는 TENG-IT의 개략도를 보여준다. TENG-IT는 피하(예: 감작된 손가락)에 삽입된다. 장비에 촉각 압력을 가한 후 TENG-IT는 격리 케이블을 사용하여 자극 커프 전극으로 전달되는 전기 신호를 생성하며, 이 전극은 가장 가까운 손상되지 않은 전입 신경 섬유 주위에 감겨 있고, 이 전극은 촉각 신호를 중추 신경계로 전달한다. TENG는 전극으로 사용되는 금속 상단에 위치한 양 및 음의 유전 물질로 구성된다(Fig. 5c-ii). Fig. 5c-(iii-v)는 다양한 출력 성능을 보여준다. 이 작업에서 Polydimethylsiloxane(PDMS)은 음전하를 띤 유전체로 선택되었으며 나일론Nylon (Ny)과 셀룰로오스 아세테이트Cellulose acetate butyrate (CAB)는 생체적합성과 유연성으로 알려진 양전하를 띤 층으로 테스트되었으며 큰 전위를 생성할 가능성이 있다.
3.4 Wearable devices
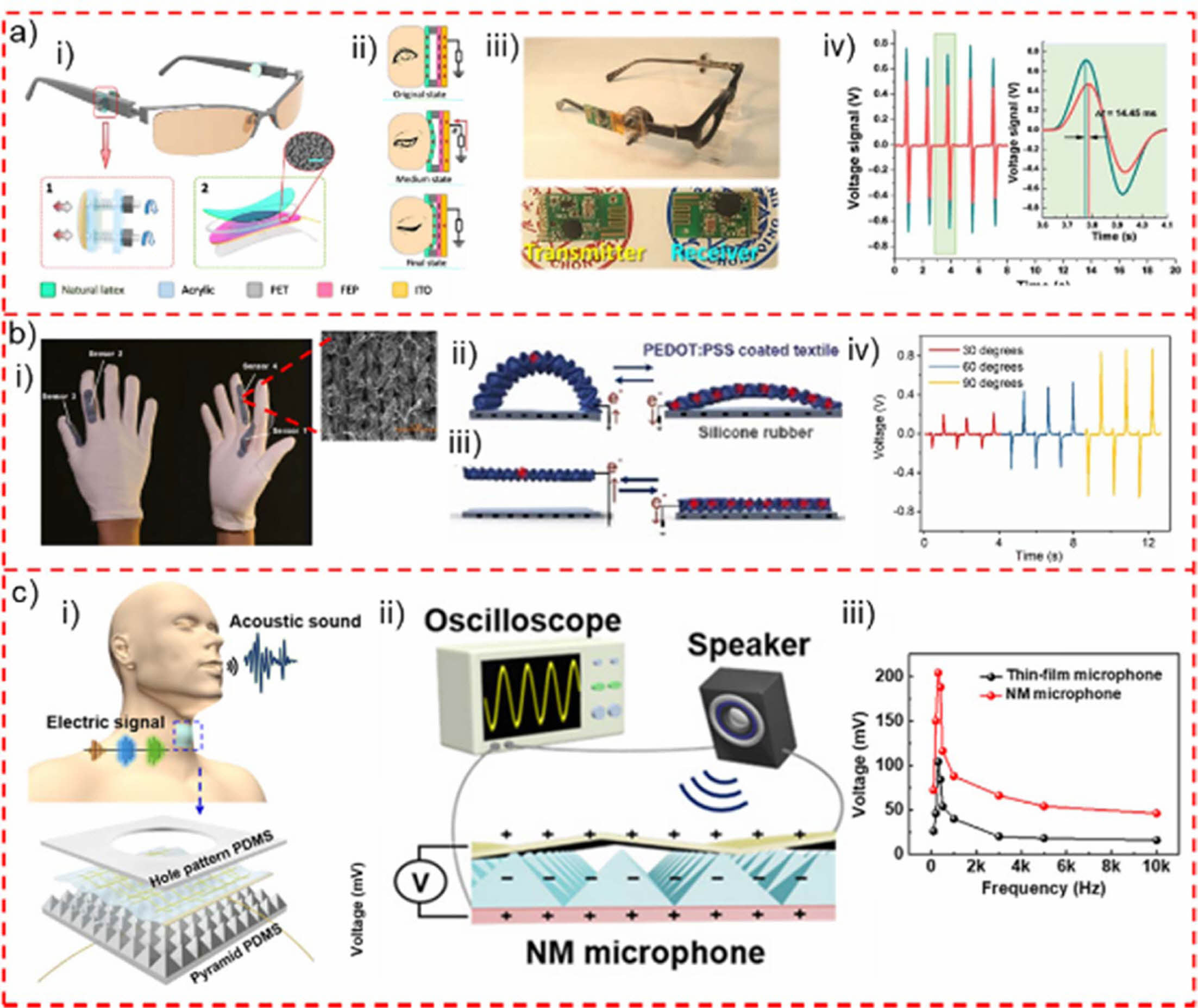
현재까지 인간-기계 인터페이스(Human Machine Interface, HMI)에 적용된 생체 전기 신호에는 신경신호, Electroencephalo- gram (EEG), Electromyogram(EMG), Electrooculogram (EOG) 신호 등이 있다. 이러한 기술들 중에서, EEG, EG, EOG는 비외상적이다[75-77]. EEG 기반 HMI는 가장 일반적으로 사용되는 방법이며 마비된 환자들이 비교적 저렴한 비용으로 외부와 소통하는 데 유용한 것으로 나타났다. PU 등(2017)은 TENG 기반 마이크로센서를 기존의 EOG 기술을 대체하는 새로운 감지 장치로 사용하고 기계적 감각의 HMI에서 획기적인 발전을 이루었다[78]. Fig. 6a-(i-iii)는 조절 가능한 장치가 있는 일반 안경의 내측 테(안경테)에 장착된 원형 Mechnosensational TENG (msTENG)를 보여준다. 2개의 아크릴 시트, 2개의 나사 및 2개의 스프링(Fig. 6a-i,1)으로 조립된 작은 고정장치는 msTENG를 위한 유연한 기계적 지지력을 제공한다. msTENG(Fig. 6a-i, 2)는 올챙이 모양의 Polyethylene Terephthalate (PET) 박층을 지지 기판으로 하여 다층 구조의 단전극 모드로 설계되었다. 이 센서 시스템의 모든 장치는 미래에 특수하게 설계된 안경테에 들어갈 만큼 충분히 작다. 수신기로부터의 깜박임 신호는 동기 측정(Fig. 6a-iv)에서 유선 신호와 비교하여 14.45 ms의 지연을 보였으나, 일상생활에서의 일상적인 동작에는 영향을 미치지 않았다.
둘째, He 등(2019)은 HMI의 모든 기능과 신호 처리 능력의 단순화를 위한 요구 사항의 균형을 맞추기 위해 두 가지 구성의 TENG를 기반으로 하는 장갑 기반 HMI의 간략한 설계를 제안했다. 장갑 기반 인터페이스는 무선 자동차 제어, 무선 드론 제어, 미니 게임 제어, VR 게임 제어, 온라인 쇼핑 커서 제어 및 알파벳 작성을 성공적으로 시연했으며 작동 기술은 간단하고 직관적이다(Fig. 6b)[79]. Fig. 6b-i와 같이 4개의 섬유 기반 TENG 센서를 포함하는 면장갑의 자체 전원 공급 인터페이스를 기반으로 하는 간단한 디자인이다. 장갑 기반 인터페이스가 4개의 움직임 감지 기능을 갖도록 하기 위해 TENG의 다기능 구조를 사용했다. 센서 요구 사항을 충족하고, 간단한 디자인의 완전 유연하고 신축성 있는 HMI를 달성하기 위해 Fig. 6b-(ii-iii)와 같이 동일한 마찰 전기 재료를 사용하여 원하는 명령을 기반으로 두 가지 유형의 센서 구성이 제안되었다. 6b-ii에서는 아치형 직물 기반 센서가 손가락 굽힘 운동을 측정하는 데 사용되며 Fig. 6b-iii에서는 검지와 인접한 손가락 사이의 접촉을 감지한다. 검지손가락을 1 Hz의 일정한 주파수로 PIP 관절에서 30도, 60도, 90도만 구부릴 수 있도록 제어하고 센서2의 실시간 출력은 3주기 동안 각 구부러짐 정도를 Fig. 6-iv와 같이 개별적으로 트리거한다.
Kang 등(2018)도 피부에 부착할 수 있는 전도성 혼합 나노 멤브레인(Nano-membrane, NM) 스피커와 마이크를 제안했는데, 뛰어난 투명도와 보형 접촉 능력으로 인해 외관이 눈에 띄지 않는다[80]. 혼합 NM은 직교 어레이 구조로 인해 광학 투명도가 크게 감소하지 않으면서 초박형 폴리머 NM의 전기적 및 기계적 특성을 크게 향상시키는 폴리머 매트릭스에 내장된 직교는 Silver nanowires (AgNW) 어레이로 구성된다. AgNW 네트워크가 있는 하이브리드 NM을 사용하여 NM 기반 웨어러블 전자 장치를 제조하려는 첫 번째 시도이기도 하다(Fig. 6c). Fig. 6c-i는 다공성 PDMS 필름과 미세 피라미드 패턴 PDMS 필름에 장착된 혼합 NM으로 구성된 피부 부착형 NM 마이크의 구조를 보여준다. 이러한 레이어 구조는 대전과 정전기 유도의 결합효과에 의해 마찰전압을 발생시켜 성대의 소리 및 진동을 정확하게 검출할 수 있다. Fig. 6c-ii는 스피커에서 발생하는 소리에 반응하여 두 마이크로폰이 발생하는 전압 파형을 모니터링한다. 두 마이크로폰 모두 100 Hz에서 10 kHz의 주파수 범위에서 좁고 날카로운 출력 전압 피크를 나타내며, 최대 전압은 400 Hz에서 얻은 후 점차 감소한다(Fig. 6c-ii). 특히, NM 마이크는 필름 마이크보다 전체 주파수 범위에서 훨씬 더 높은 출력 전압을 생성하였다. 이 웨어러블 기반 인터페이스는 보다 직관적이고 간단하지만 전력적으로 호환되는 제어 방법을 제공하기 위해 더 많은 응용 프로그램에 통합될 수 있다.
3.5 Attachable wearable devices
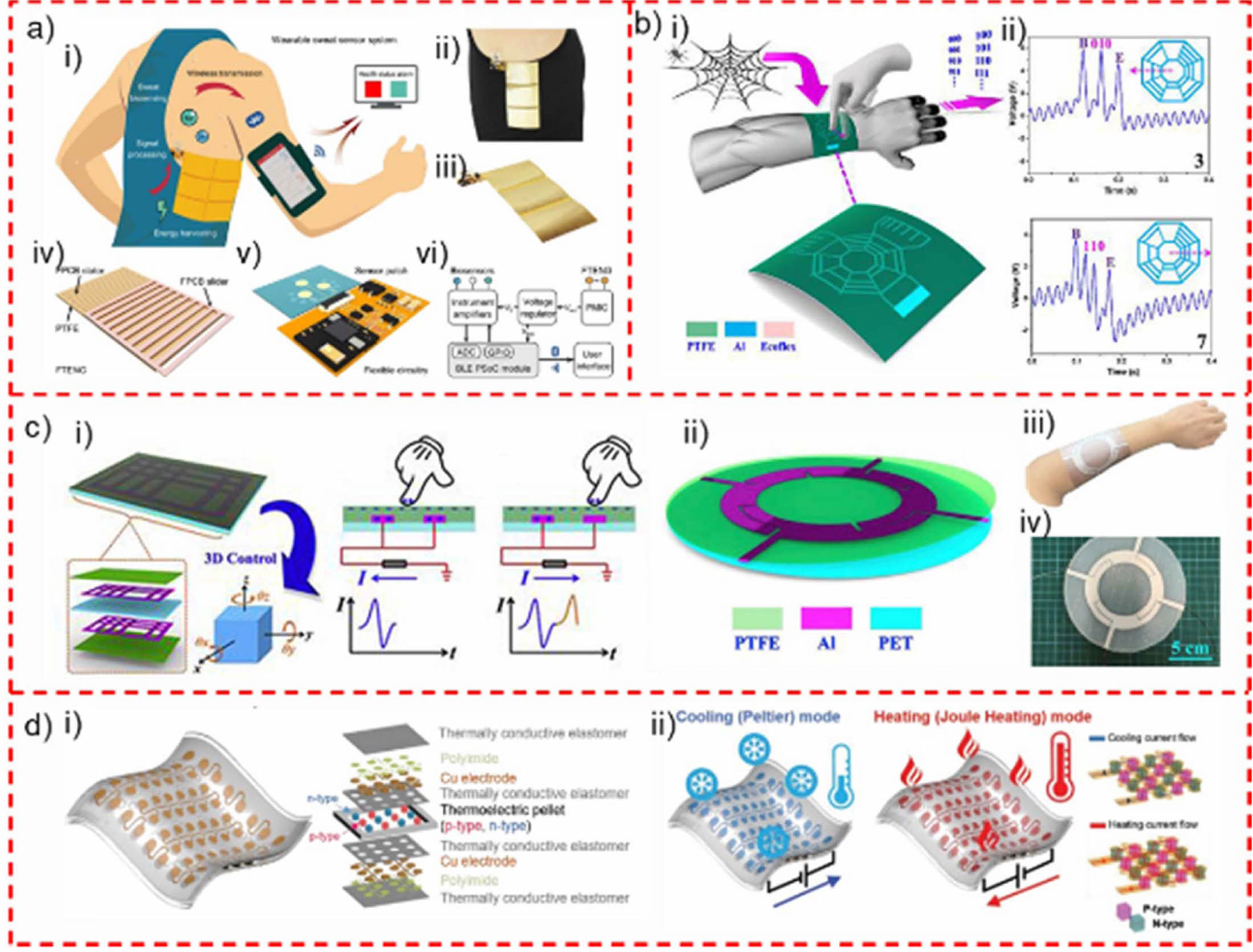
무선 웨어러블 디바이스는 건강 상태를 나타내는 실시간 생리학적 데이터를 추출하여 사용자 디바이스에 연속적인 데이터를 전송할 수 있는 비외상적인 방법을 제공한다. 맥박, 호흡수, 온도 등 다양한 활력징후를 감지할 수 있는 웨어러블 기기가 일상 생활(5~9)에 널리 상용화되고 있다. Song 등(2020)은 배터리가 없이 완전 자체 전원 공급 웨어러블 시스템을 제안했으며 이 시스템은 고효율 웨어러블 독립 모드 TENG, 저전력 무선 센서 회로 및 단일 플렉시블 인쇄 회로 기판의 미세 유체 땀 센서 패치로 구성되어 주요 땀 바이오마커(예: pH 및 Na+)를 동적으로 모니터링할 수 있다(Fig. 7a-i). 이 독립형 마찰전기 나노발전기Freestanding-mode TENG (FTENG)에 의해 구동되는 웨어러블 땀 센서 시스템은 기존의 Flexible printed circuit board (FPCB) 제조 공정과 호환되도록 설계되어 대량 생산과 높은 신뢰성을 보인다. FPCB의 독립적인 설계와 효과적인 전원 관리, 특히 피부 인터페이스 웨어러블 장치에 전원을 공급하는 데 적합한 인체 피부에서 에너지를 효율적으로 수집할 수 있다(Fig. 7a-(ii-iii))[81]. 통합된 블루투스 저전력Bluetooth Low Energy (BLE) 모듈은 운동 중 건강 상태를 추적할 수 있도록 센서 데이터를 모바일 인터페이스로 편리하게 전송할 수 있다. 다중 땀 감지용 일체형 배터리 없이 마찰 전기 구동 웨어러블 시스템(Fig. 7a-(iv-vi))을 처음으로 시연했다.
Shi 등(2019)은 거미줄 레이아웃에 의해 영감을 받은 단일 전극 마찰 전기 인터페이스를 개발했다. Bio-inspired spider-net-coding (BISN) 인터페이스는 신호 검출 메커니즘이 절대 크기(Fig. 7b)[82]에서 독립적이기 때문에 서로 다른 슬라이딩 힘, 슬라이딩 속도 및 주변 습도와 같은 다양한 시나리오에서 신호 검출을 위해 확장성이 높고 강력하며 신뢰할 수 있다. Fig. 7b-i는 인간 팔에 부착된 BISNC 인터페이스의 개략도와 장치가 Ecoflex 기판, 패턴화된 알루미늄 전극 및 PTFE 마찰층의 3층만으로 구성되어 매우 간결한 장치 구성을 형성한다. Fig. 7b-i는 인간 팔에 부착된 BISNC 인터페이스의 설계도를 보여준다. 그리고 이 소자는 Ecoflex 기판, 패턴화된 알루미늄 전극 및 PTFE 마찰층의 3개의 얇은 층으로만 구성되어 매우 간결한 소자 구성을 형성한다. 전극 너비가 4 mm이고 전극 간격이 6 mm에 불과한 또 다른 코딩 BISNC 인터페이스가제안되었다. 그런 다음 중간에 있는 3개의 전극은 각각 000, 001, 010, 011, 100, 101, 110, 111의 3자리 이진 코드로 인코딩된다(여기서 ‘1’은 이 위치에 스트립 전극이 있음을 나타내고 ‘0’은 이 위치에 스트립 전극이 없음을 나타낸다).
Shi 등(2019)은 타악기, 슬라이딩, 타악기 + 슬라이딩 등을 포함하여 서로 다른 인간 상호 작용의 위치와 작동 방법을 구별하기 위해 4개의 센서 전극만 분할 루프 구조로 배열된 마찰 전기 상호 작용 패치를 제안했다(Fig. 7c). 4개의 전극의 단일 영역과 공통 연결 영역을 사용하여 8개의 전극 포인트를 정의하여 다양한 유형의 동작을 감지한다[83]. 개발된 상호 작용 패치는 인간의 팔에 모양을 유지하여 부착할 수 있으며 다양한 인간-기계 상호 작용 응용 분야에서 유연한 웨어러블 및 자체 전원 공급 인터페이스로서의 큰 잠재력을 보여 준다. 지정된 의미를 가진 다양한 작업을 정의하여 장치에서 식별 코드 시스템의 인터페이스를 개발한다. 또한 게임, 가상현실, 증강현실, 엔터테인먼트 및 로봇 분야의 잠재적 응용을 위한 제어 인터페이스도 이 장치를 기반으로 개발할 수 있다(Fig. 7c(ii-iv)).
Li 등(2020)은 시각과 촉각 감각 외에도 피부 위의 온도 감각을 통한 열감각은 환경과 물체에 대한 풍부한 물리적 정보를 제공할 수 있다고 제안했다. 열전도성 엘라스토머 골격과 열전소재를 기반으로 착용 가능한 피부 VR 응용을 위한 인공 냉열감을 제공하고 최대 230% 이상 연장 시 열전달이 가능한 신축성 상호접속 전극과 연결된 Skin-like thermo-haptic (STH) 장비가 전시되어 있다(Fig. 7d)[84]. Fig. 7d-i는 장비의 단순화된 설계도를 보여준다. 매우 가변적인 구조와 열전도성 엘라스토머에 내장된 뱀 모양의 전극으로 인해 더 높은 양방향 변형률을 견딜 수 있다.
|
Fig. 3 Bionic crawling soft robots based on triboelectric power generation. a) Slug-inspired TENG-Robot. (ii) Schematic illustration of the Slug-inspired TENG-Robot. Schematic circuit diagram of TENG-Robot was demonstrated. The locomotion performance and triboelectric generation ability of TENG-Robot were demonstrated. 83 LEDs were lighted up by TENG-Robot. The locomotion behaviors of TENG-Robot actuated by rotating magnetic field was demonstrated. (ii) The open circuit voltage (Voc) of crawling TENG-Robot driven by rotating magnetic field at frequency of 2Hz and intensity of 70 mT. Voc of TENG-Robot driven by rotating magnetic field in one cycle was shown at partial enlargement. (iii) The output voltages of TENG-Robot on different terrains (gap, tunnel, curve, and slope). Reproduced with permission from Ref. [61]. Copyright 2022, ELSEVIER. b) Bioinspired Triboelectric Soft Robot. (i) Schematic diagram of TESR system that consists of the TESR, control module and rotary freestanding triboelectric nanogenerator (RF-TENG). (ii) Exploded view and special components of soft-deformable body. (iii) The schematic diagram of displacement and force generated by the soft-deformable body and the schematic circuit diagram of soft-deformable body. (iv) Schematic of crawling process of TESR based on the locomotion principle of inchworm and the working principle of RF-TENG in one cycle. Reproduced with permission from Ref. [19]. Copyright 2021, Wiley-VCH. c) TENG and soft robot conjunction system. (i) A freestanding TENG is directly connected to the soft robot. The soft robot is composed of a dielectric elastomer actuator (DEA), a compliant arc-shaped body and three one-way bearing wheels. When sliding the TENG, a voltage is generated to actuate the DEA. The DEA elongates and retracts, producing a displacement of the robot. In one sliding cycle, the soft robot completes a locomotion step. (ii) The soft robot passes a tunnel under an increased bias voltage level to lower its body. The left view of the robot moves through a narrow gap that is half the height of the robot. The process is composed of five states: standing by, I, II, III, and finishing. Reproduced with permission from Ref. [62]. Copyright 2021, ELSEVIER |

|
Fig. 4 Soft grippers based on triboelectric generation. a) Soft gripper based on TENG sensor. (i) The length TENG (L-TENG) sensor and (ii) the tactile TENG (T-TENG) sensor. (iii)The soft gripper integrated with TENG sensors. (iv)The intelligent sensory data processing strategies. E1 to E4, and EL represent the electrodes in the T-TENG sensor. Reproduced with permission from Ref. [64]. Copyright 2020, Springer Nature. b) The sensorized pneumatic soft robot (PSA). i) Photographs of the fabricated sensorized PSA. (ii) Soft grippers used in assisting glove. (iii) The working principle of the TENG. The inner wall of the chamber and the sponge electrode together form a single-electrode TENG. According to the triboelectric series, the silicone chamber is more electro-negative than the sponge electrode (Nickle). In the contacted state, the silicone rubber will get electrons from the electrode while the electrode contains equal positive charge. At the inflation state, the PSA is driven to bend by pressured air. The negatively charged silicone chamber expands and generally separates from the electrode. The positive charge flows out of the electrode to balance the potential rising. At the deflation state, the chamber slowly contracts back to its original shape. And the charged silicone contacts with the electrode again. The positive charge flow into the electrode due to the electrostatic induction. (iv) Photograph of the gripper catched a small cup. Reproduced with permission from Ref. [65]. Copyright 2020, ELSEVIER. c) Smart soft gripper. Schematic design of an assembled gripper, in which three finger-like actuators are separated uniformly (120°) and installed on a 3D printed gripper stand. (i) Demonstration of the smart gripper can grasp the spherical shell. When the soft fingers bend and approach the spherical ball, TS-2 will first contact with the ball and followed by TS-1, and finally TS-3. The relative position and size of the object with the gripper may affect this contact sequence. (ii) Demonstration of grasping the same object with increased weight. Reproduced with permission from Ref. [66]. Copyright 2020, Wiley-VCH. d) Dual-stimulus flexible gripper based on TENG and vapor induction. The working principle and three working processes of the flexible gripper: (i) ethanol vapor drives the gripper to open, (ii) TENG drives the gripper to hold the object, (iii) TENG reopens the gripper and unloads the object. Reproduced with permission from Ref. [67]. Copyright 2019, ACS |
|
Fig. 5 Tactile communication display system based on triboelectric generation. a) Refreshable Braille Display System Based on Triboelectric Nanogenerator. (i) Exploded view of the Braille display module and control module. (ii) Photos of one operation cycle of RBDS. When sliding the Kapton slider on the Al foil, the morphology of the DED would be correspondingly changed. (iii) Schematic diagram of operation mechanism of RBDS. The Al film is connected to an electrode of the DE membrane, the other electrode of the DE film is grounded, the "black dot" is the top view of the DE membrane. Reproduced with permission from Ref. [72]. Copyright 2020, Wiley-VCH. b) Self-powered electro-tactile system. b) Skin-integrated ET interface. (i) Shows the schematic illustration of the ET system to transmit virtual spatial pattern, exploded view of the electrode array, ET sense of the ET system (controlled distance, 0.4 mm), optical images of the electrode array (scale bar, 10 mm), and the image of the TENG array (21 units sized in 20 × 20 mm; center-to-center distance, 40 mm; scale bar, 20 mm). (ii) An example of ET interface applied for enhancing tactile VR experience of precepting virtual spatial patterns (random figures). Reproduced with permission from Ref. [73]. Copyright 2021, Science. c) Integrated tactile TENG (TENG-IT) device. (i) Use of TENG-IT for restoring tactile sensation. The TENG-IT is implanted under the skin. Upon application of tactile pressure to the device, the TENG-IT generates an electrical signal, which is delivered using isolated cables to a stimulating cuff electrode wrapped around the closest undamaged afferent nerve fiber, which transduces a touch sensation signal to the CNS. (ii) Schematic of the TENG-IT layers (left) and a photo of the TENG-IT (right) (scale bar: 2 mm). (iii) Mean peak-to-peak electrical output modulation of TENG-IT (5 mm × 5 mm), as a function of the materials used for the friction layers. (iv) Output performance of TENG-IT (5 mm × 5 mm) for different levels of pressure applied. (v) TENG-IT (5 mm × 5 mm) response to physiological pressure. We observe a linear correlation (R2 = 0.97) between the average peak-to-peak output voltage and pressure applied to the device. Reproduced with permission from Ref. [74]. Copyright 2021, ACS |
|
Fig. 6 Wearable devices based on triboelectric generation. a) Eye motion triggered self-powered mechnosensational communication system. (ii) Schematic structure of a pair of ordinary glasses mounted with msTENG. Bottom left: Structure of the fixing device for convenient adjustment. Bottom right: Schematic diagram of the msTENG. Inset: An SEM image of FEP nanowires. Scale bar, 5μm. (ii) Schematics of the operating principle of msTENG. Charge behavior when the eye is at different states during the blinking process. (iii) The msTENG glasses are assembled with wireless transceiver module to make it easier to use. (iv) Synchronous acquisition of wired (green) versus wireless (red) signal. Reproduced with permission from Ref. [78]. Copyright 2017, Science. b) Self-powered glove. (i) Photographs with a front view and a side view demonstrating the configurations and the positions of the four sensors. Inset shows the SEM image of the PEDOT:PSS coated textile. (ii) The working mechanism of the arch-shaped TENG under the stretching and releasing state. (iii) The working mechanism of the contact-separation TENG sensor. (iv) The real-time output of sensor 2 when the index finger bends downs at 30 degrees, 60 degrees, and 90 degrees at a same speed. Reproduced with permission from Ref. [79]. Copyright 2019, ELSEVIER. c) Wearable and transparent NM microphone. (i) Schematic of a wearable NM microphone device. (ii) Sensing measurement system for the NM microphone. (iii) Variation in the output voltages as a function of sound frequency for the NM microphone and the thin-film microphone. Reproduced with permission from Ref. [80]. Copyright 2018, Science |
|
Fig. 7 Stickable wearable devices based on triboelectric generation. a) Wireless wearable sweat biosensors. (i) Schematic illustrating the FWS3 that integrates human motion energy harvesting, signal processing, microfluidic-based sweat biosensing, and Bluetooth-based wireless data transmission to a mobile user interface for real-time health status tracking. (ii and iii) Optical images of an FPCB-based FWS3, which can be worn on a human side torso. Scale bars, 4 cm. (iv) Schematic diagram of the FPCB-based FTENG with a grating slider and an interdigital stator. (v) Schematic diagram of the FWS3 showing a microfluidic-based sweat sensor patch interfacing with the flexible circuitry. (vi) System-level block diagram showing the power management, signal transduction, processing, and wireless transmission of the FWS3 from the FTENG to the biosensors, then to the user interface. Reproduced with permission from Ref. [81]. Copyright 2020, Science. b) Self-Powered Bio-Inspired Spider-Net-Coding Interface. (i) Schematic diagram of the spider-net-inspired BISNC interface and its diversified applications. Inset shows the schematic diagram and layer structure of the BISNC interface with L/S coding. (ii) The corresponding output peaks when finger sliding across the electrode patterns. Insets show the different sliding directions. Reproduced with permission from Ref. [82]. Copyright 2019, Wiley-VCH. c) A flexible wearable triboelectric patch. (i) Device configuration and working principle of the triboelectric interacting patch. (ii) 3D schematic diagram showing the succinct structure of the device with three thin layers. (iii) Digital photograph showing the flexible device can be attached conformally on arm. (iv) Digital photograph of the device on a flat surface. Reproduced with permission from Ref. [83]. Copyright 2019, ELSEVIER. d) Stretchable Skin-Like Cooling/Heating Device. (i) A simplified illustration and an exploded view of the STH device. (ii) Schematic illustration of device bifunctionality, which can both cool/ heat the body surface with a single device by simply changing the current direction. The two mini-figures on the right show the current flow through the electrode and pellet array in the series connection for both the cooling and heating modes. Reproduced with permission from Ref. [84]. Copyright 2020, Wiley-VCH |
광범위한 재료 선택과 다양한 구조 설계의 장점으로 TENG 기반 나노 발전기 기술은 소프트 로봇 분야에서 널리 연구되었다. 이 리뷰에서는 자체 전력을 제공하는 바이오닉 소프트웨어 로봇, 웨어러블 기기, 로봇 관련 휴먼 인터페이스 등 다양한 응용 시나리오에서 TENG 기반 나노 발전 기술의 핵심 기술과 발전을 체계적으로 요약하였다. 자체 전력 공급 TENG 나노 발전 기술과 에너지 수집기 또는 수동 무선 전송 기술의 통합도 소프트 로봇 배터리 리스 제어를 가능하게 한다. 또한 TENG 구동방식을 기반으로 제작된 소프트로봇과 디바이스는 생체인증, 스텝분석, 제스처인식, 객체인식 등 고급 상호작용을 동시에 구현할 수 있어 향후 인공지능 시대에는 TENG 기반의 지능형 상호작용 시스템의 기능을 강화할 수 있다. 또한 TENG 센서는 다른 감지 메커니즘과 융합하여 다양한 환경 조건에서 다기능 목적 또는 더 강력한 성능을 위한 다중 모드 센서와 AI 분석의 융합을 실현할 수 있다.
향후 TENG 기술의 발전 방향은 먼저 나노 소재 발전기를 만들기 위해 더 큰 전압과 전류를 생성할 수 있는 새로운 나노 소재를 계속 찾고 개발하는 것이다. 새로운 응용 프로그램을 설계하고 개발할 때 AI, VR 및 기타 기술을 결합하여 물리적 세계와 실시간 가상 접촉을 구축할 수 있다. 이 TENG 기반 시스템은 기존 VR/AR 기술의 지속 가능성 문제와 회선 제한을 해결할 수 있는 서로 다른 자체 전원 가상 촉각 자극 시스템이다. 둘째, TENG 나노발전기를 만들 때 접촉 분리 모드를 가진 TENG 기반 모델을 설계하여 접촉 물질 및 습도와 같은 다른 환경 요인의 영향을 제거할 수 있다. 마지막으로 전원 변환을 해결하기 위한 방안으로는 다음 두 가지를 고려할 수 있다. 하나는 일반적인 감압 전하 펌프 방식을 사용하는 것으로 먼저 여러 개의 소용량 고전압 용량을 직렬로 충전한 다음 출력을 직렬로 변환하는 것이다. 또 다른 간단한 해결책은 포토커플러를 사용하여 직렬로 더 많은 LED를 준비한 다음 배터리를 점등시키는 것이다. 중간 변환은 손실이 있지만 적어도 직접 충전하는 용량보다는 더 강하다.
TENG 기술이 도입되면 자기구동 소프트웨어 로봇이나 장치 개발에 유망한 연구방향을 제공할 것으로 기대된다.
This research was supported by National R&D Program through the National Research Foundation of Korea (NRF) funded by Ministry of Science and ICT (2022M3D1A2054488).
- 1. Wang, Z.L., “Triboelectric Nanogenerators as New Energy Technology and Self-powered Sensors-principles, Problems and Perspectives,” Faraday Discussions, Vol. 176, 2014, pp. 447-458.
-

- 2. Liu, D., Zhou, L., Wang, Z.L., and Wang, J., “Triboelectric Nanogenerator: from Alternating Current to Direct Current,” Iscience, Vol. 24, No. 1, 2021, pp. 102018.
-
- 3. Fabish, T.J., and Duke, C.B., “Molecular Charge States and Contact Charge Exchange in Polymers,” Journal of Applied Physics, Vol. 48, No. 10, 1977, pp. 4256-4266.
-
- 4. Yang, Y., Lin, L., Zhang, Y., Jing, Q., Hou, T.-C., and Wang, Z.L., “Self-powered Magnetic Sensor Based on a Triboelectric Nanogenerator,” ACS Nano, Vol. 6, No. 11, 2012, pp. 10378-10383.
-
- 5. Wang, S., Lin, L., and Wang, Z.L., “Nanoscale Triboelectric-effect-enabled Energy Conversion for Sustainably Powering Portable Electronics,” Nano Letters, Vol. 12, No. 12, 2012, pp. 6339-6346.
-
- 6. Fan, F.-R., Lin, L., Zhu, G., Wu, W., Zhang, R., and Wang, Z.L., “Transparent Triboelectric Nanogenerators and Self-powered Pressure Sensors Based on Micropatterned Plastic Films,” Nano Letters, Vol. 12, No. 6, 2012, pp. 3109-3114.
-
- 7. Fan, F.-R., Tian, Z.-Q., and Wang, Z.L., “Flexible Triboelectric Generator,” Nano Energy, Vol. 1, No. 2, 2012, pp. 328-334.
-
- 8. Wu, C., Wang, A., Ding, W., Guo, H., and Wang, Z., “Triboelectric Nanogenerator: A Foundation of the Energy for the New Era”, Advanced Energy Materials, Vol. 9, 2019, 1802906.
-
- 9. Wang, Z., “Triboelectric Nanogenerator (TENG)—Sparking an Energy and Sensor Revolution”, Advanced Energy Materials, Vol. 10, 2020, pp. 2000137.
-
- 10. Wang, Z., and Jian, Y., “Heat Transport of Electrokinetic Flow in Slit Soft Nanochannels,” Micromachines, Vol. 10, No. 1, 2019, pp. 34.
-
- 11. Cao, B., Wang, P., Rui, P., Wei, X., Wang, Z., Yang, Y., Tu, X., Chen, C., Wang, Z., and Yang, Z., “Broadband and Output‐Controllable Triboelectric Nanogenerator Enabled by Coupling Swing‐Rotation Switching Mechanism with Potential Energy Storage/Release Strategy for Low‐Frequency Mechanical Energy Harvesting,” Advanced Energy Materials, Vol. 12, 2022, 2202627.
-
- 12. Jiang, D., Liu, G., Li, W., Bu, T., Wang, Y., Zhang, Z., Pang, Y., Xu, S., Yang, H., and Zhang, C., “A Leaf-shaped Triboelectric Nanogenerator for Multiple Ambient Mechanical Energy Harvesting,” IEEE Transactions on Power Electronics, Vol. 35, No. 1, 2019, pp. 25-32.
-
- 13. Chen, B., Yang, Y., and Wang, Z.L., “Scavenging Wind Energy by Triboelectric Nanogenerators,” Advanced Energy Materials, Vol. 8, No. 10, 2018, pp. 1702649.
-
- 14. Xi, F., Pang, Y., Liu, G., Wang, S., Li, W., Zhang, C., and Wang, Z.L., “Self-powered Intelligent Buoy System by Water Wave Energy for Sustainable and Autonomous Wireless Sensing and Data Transmission,” Nano Energy, Vol. 61, 2019, pp. 1-9.
-
- 15. Wang, Z.L., Jiang, T., and Xu, L., “Toward the Blue Energy Dream by Triboelectric Nanogenerator Networks,” Nano Energy, Vol. 39, 2017, pp. 9-23.
-
- 16. Khan, U., and Kim, S.-W., “Triboelectric Nanogenerators for Blue Energy Harvesting,” ACS Nano, Vol. 10, No. 7, 2016, pp. 6429-6432.
-
- 17. Zhao, J., Zhen, G., Liu, G., Bu, T., Liu, W., Fu, X., Zhang, P., Zhang, C., and Wang, Z.L., “Remarkable Merits of Triboelectric Nanogenerator than Electromagnetic Generator for Harvesting Small-amplitude Mechanical Energy,” Nano Energy, Vol. 61, 2019, pp. 111-118.
-
- 18. Askari, H., Khajepour, A., Khamesee, M.B., Saadatnia, Z., and Wang, Z.L., “Piezoelectric and Triboelectric Nanogenerators: Trends and Impacts,” Nano Today, Vol. 22, 2018, pp. 10-13.
-
- 19. Liu, Y., Chen, B., Li, W., Zu, L., Tang, W., and Wang, Z.L., “Bioinspired Triboelectric Soft Robot Driven by Mechanical Energy,” Advanced Functional Materials, Vol. 31, No. 38, 2021, pp. 2104770.
-
- 20. Ding, W., Wang, A.C., Wu, C., Guo, H., and Wang, Z.L., “Human-machine Interfacing Enabled by Triboelectric Nanogenerators and Tribotronics,” Advanced Materials Technologies, Vol. 4, No. 1, 2019, pp. 1800487.
-
- 21. Dharmasena, R., Jayawardena, K., Saadi, Z., Yao, X., Bandara, R., Zhao, Y., and Silva, S.R.P., “Energy Scavenging and Powering E-skin Functional Devices,” Proceedings of the IEEE, Vol. 107, No. 10, 2019, pp. 2118-2136.
-
- 22. Gunawardhana, K.S.D., Wanasekara, N.D., and Dharmasena, R.I.G., “Towards Truly Wearable Systems: Optimizing and Scaling up Wearable Triboelectric Nanogenerators,” Iscience, Vol. 23, No. 8, 2020, pp. 101360.
-
- 23. Yang, H., Fan, F.R., Xi, Y., and Wu, W., “Design and Engineering of High‐performance Triboelectric Nanogenerator for Ubiquitous Unattended Devices,” EcoMat, Vol. 3, No. 2, 2021, pp. e12093.
-
- 24. Chen, H., Song, Y., Guo, H., Miao, L., Chen, X., Su, Z., and Zhang, H., “Hybrid Porous Micro Structured Finger Skin Inspired Self-powered Electronic Skin System for Pressure Sensing and Sliding Detection,” Nano Energy, Vol. 51, 2018, pp. 496-503.
-
- 25. Xiao, X., Zhang, X., Wang, S., Ouyang, H., Chen, P., Song, L., Yuan, H., Ji, Y., Wang, P., and Li, Z., “Honeycomb Structure Inspired Triboelectric Nanogenerator for Highly Effective Vibration Energy Harvesting and Self‐powered Engine Condition Monitoring,” Advanced Energy Materials, Vol. 9, No. 40, 2019, pp. 2070035.
-
- 26. Li, X., Mu, J., He, J., Fan, X., Zhang, Q., Hou, X., Geng, W., Zhang, W., and Chou, X., “Bioinspired Helical Triboelectric Nanogenerators for Energy Conversion of Motion,” Advanced Materials Technologies, Vol. 5, No. 4, 2020, pp. 1900917.
-
- 27. Zhou, Q., Lee, K., Kim, K.N., Park, J.G., Pan, J., Bae, J., Baik, J.M., and Kim, T., “High Humidity-and Contamination-resistant Triboelectric Nanogenerator with Superhydrophobic Interface,” Nano Energy, Vol. 57, 2019, pp. 903-910.
-
- 28. Yoo, D., Park, S.-C., Lee, S., Sim, J.-Y., Song, I., Choi, D., Lim, H., and Kim, D.S., “Biomimetic Anti-reflective Triboelectric Nanogenerator for Concurrent Harvesting of Solar and Raindrop Energies,” Nano Energy, Vol. 57, 2019, pp. 424-431.
-
- 29. Yao, G., Xu, L., Cheng, X., Li, Y., Huang, X., Guo, W., Liu, S., Wang, Z.L., and Wu, H., “Bioinspired Triboelectric Nanogenerators as Self‐powered Electronic Skin for Robotic Tactile Sensing,” Advanced Functional Materials, Vol. 30, No. 6, 2020, pp. 1907312.
-
- 30. Zhang, J.-H., Li, Y., Du, J., Hao, X., and Wang, Q., “Bio-inspired hydrophobic/cancellous/hydrophilic Trimurti PVDF Mat-based Wearable Triboelectric Nanogenerator Designed by Self-assembly of Electro-pore-creating,” Nano Energy, Vol. 61, 2019, pp. 486-495.
-
- 31. Yu, B., Yu, H., Huang, T., Wang, H., and Zhu, M., “A Biomimetic Nanofiber-based Triboelectric Nanogenerator with an Ultrahigh Transfer Charge Density,” Nano Energy, Vol. 48, 2018, pp. 464-470.
-
- 32. Kim, H.J., Kim, J.H., Jun, K.W., Kim, J.H., Seung, W.C., Kwon, O.H., Park, J.Y., Kim, S.W., and Oh, I.K., “Silk Nanofiber‐networked Bio‐triboelectric Generator: Silk Bio‐TEG,” Advanced Energy Materials, Vol. 6, No. 8, 2016, pp. 1502329.
-
- 33. Chen, B.D., Tang, W., He, C., Deng, C.R., Yang, L.J., Zhu, L.P., Chen, J., Shao, J.J., Liu, L., and Wang, Z.L., “Water Wave Energy Harvesting and Self-powered Liquid-surface Fluctuation Sensing Based on Bionic-jellyfish Triboelectric Nanogenerator,” Materials Today, Vol. 21, No. 1, 2018, pp. 88-97.
-
- 34. Lai, Y.C., Deng, J., Niu, S., Peng, W., Wu, C., Liu, R., Wen, Z., and Wang, Z.L., “Electric Eel‐skin‐inspired Mechanically Durable and Super‐stretchable Nanogenerator for Deformable Power Source and Fully Autonomous Conformable Electronic‐skin Applications,” Advanced Materials, Vol. 28, No. 45, 2016, pp. 10024-10032.
-
- 35. Wang, F., Ren, Z., Nie, J., Tian, J., Ding, Y., and Chen, X., “Self‐powered Sensor Based on Bionic Antennae Arrays and Triboelectric Nanogenerator for Identifying Noncontact Motions,” Advanced Materials Technologies, Vol. 5, No. 1, 2020, pp. 1900789.
-
- 36. Dong, K., Wu, Z., Deng, J., Wang, A.C., Zou, H., Chen, C., Hu, D., Gu, B., Sun, B., and Wang, Z.L., “A Stretchable Yarn Embedded Triboelectric Nanogenerator as Electronic Skin for Biomechanical Energy Harvesting and Multifunctional Pressure Sensing,” Advanced Materials, Vol. 30, No. 43, 2018, pp. 1804944.
-
- 37. Bu, T., Xiao, T., Yang, Z., Liu, G., Fu, X., Nie, J., Guo, T., Pang, Y., Zhao, J., Xi, F., Zhang, C., and Wang, Z.L., “Stretchable Triboelectric-photonic Smart Skin for Tactile and Gesture Sensing,” Advanced Materials, Vol. 30, No. 16, 2018, pp. 1800066.
-
- 38. Pu, X., Liu, M., Chen, X., Sun, J., Du, C., Zhang, Y., Zhai, J., Hu, W., and Wang, Z.L., “Ultrastretchable, Transparent Triboelectric Nanogenerator as Electronic Skin for Biomechanical Energy Harvesting and Tactile Sensing,” Science Advances, Vol. 3, No. 5, 2017, pp. e1700015.
-
- 39. Jang, J., Lee, J., Jang, J.H., and Choi, H., “A Triboelectric‐based Artificial Basilar Membrane to Mimic Cochlear Tonotopy,” Advanced Healthcare Materials, Vol. 5, No. 19, 2016, pp. 2481-2487.
-
- 40. Liu, Y., Zhong, J., Li, E., Yang, H., Wang, X., Lai, D., Chen, H., and Guo, T., “Self-powered Artificial Synapses Actuated by Triboelectric Nanogenerator,” Nano Energy, Vol. 60, 2019, pp. 377-384.
-
- 41. Wu, C., Kim, T.W., Park, J.H., Koo, B., Sung, S., Shao, J., Zhang, C., and Wang, Z.L., “Self-powered Tactile Sensor with Learning and Memory,” ACS Nano, Vol. 14, No. 2, 2019, pp. 1390-1398.
-
- 42. Li, D., Niu, D., Ye, G., Lei, B., Jiang, W., Luo, F., Chen, J., Li, X., Qu, S., and Liu, H., “Intergrated Shape Memory Alloys Soft Actuators with Periodic and Inhomogeneous Deformations by Modulating Elastic Tendon Structures,” Advanced Engineering Materials, Vol. 22, No. 12, 2020, pp. 2000640.
-
- 43. Li, H., Yao, J., Zhou, P., Chen, X., Xu, Y., and Zhao, Y., “High-force Soft Pneumatic Actuators Based on Novel Casting Method for Robotic Applications,” Sensors and Actuators A: Physical, Vol. 306, 2020, pp. 111957.
-
- 44. Sivaperuman Kalairaj, M., Cai, C.J., and Ren, H., “Untethered Origami Worm Robot with Diverse Multi-Leg Attachments and Responsive Motions under Magnetic Actuation,” Robotics, Vol. 10, No. 4, 2021, pp. 118.
-
- 45. Wani, O.M., Zeng, H., and Priimagi, A., “A Light-driven Artificial Flytrap,” Nature Communications, Vol. 8, No. 1, 2017, pp. 1-7.
-
- 46. Tang, Y., Chi, Y., Sun, J., Huang, T.-H., Maghsoudi, O. H., Spence, A., Zhao, J., Su, H., and Yin, J., “Leveraging Elastic Instabilities for Amplified Performance: Spine-inspired High-speed and High-force Soft Robots,” Science Advances, Vol. 6, No. 19, 2020, pp. eaaz6912.
-
- 47. Burroughs, M.L., Beauwen Freckleton, K., Abbott, J.J., and Minor, M.A., “A Sarrus-based Passive Mechanism for Rotorcraft Perching,” Journal of Mechanisms and Robotics, Vol. 8, No. 1, 2016,
-
- 48. Ilievski, F., Mazzeo, A.D., Shepherd, R.F., Chen, X., and Whitesides, G.M., “Soft Robotics for Chemists,” Angewandte Chemie, Vol. 123, No. 8, 2011, pp. 1930-1935.
-
- 49. Lu, H., Hong, Y., Yang, Y., Yang, Z., and Shen, Y., “Battery‐less Soft Millirobot that Can Move, Sense, and Communicate Remotely by Coupling the Magnetic and Piezoelectric Effects,” Advanced Science, Vol. 7, No. 13, 2020, pp. 2000069.
-
- 50. Yue, Y., Wang, Q., Ma, Z., Wu, Z., Zhang, X., Li, D., Shi, Y., and Su, B., “Neuron-Inspired Soft Robot Teams and Their Non-Contact Electric Signal Transmission Based on Electromagnetic Induction,” Soft Robotics, 2022.
-
- 51. Ebrahimi, N., Bi, C., Cappelleri, D. J., Ciuti, G., Conn, A. T., Faivre, D., Habibi, N., Hošovský, A., Iacovacci, V., Khalil, I. S., Magdanz, V., Mesra, S., Pawashe, C., Rashififar, R., Soto-Rodriguez, P.E.D., Fekete, Z., and Jafari, A., “Magnetic Actuation Methods in Bio/soft Robotics,” Advanced Functional Materials, Vol. 31, No. 11, 2021, pp. 2005137.
-
- 52. Meng, J., Li, H., Zhao, L., Lu, J., Pan, C., Zhang, Y., and Li, Z., “Triboelectric Nanogenerator Enhanced Schottky Nanowire Sensor for Highly Sensitive Ethanol Detection,” Nano Letters, Vol. 20, No. 7, 2020, pp. 4968-4974.
-
- 53. Lei, R., Shi, Y., Ding, Y., Nie, J., Li, S., Wang, F., Zhai, H., Chen, X., and Wang, Z.L., “Sustainable High-voltage Source Based on Triboelectric Nanogenerator with a Charge Accumulation Strategy,” Energy & Environmental Science, Vol. 13, No. 7, 2020, pp. 2178-2190.
-
- 54. Yang, D., Kong, X., Ni, Y., Ren, Z., Li, S., Nie, J., Chen, X., and Zhang, L., “Ionic Polymer-metal Composites Actuator Driven by the Pulse Current Signal of Triboelectric Nanogenerator,” Nano energy, Vol. 66, 2019, pp. 104139.
-
- 55. Li, Z., Zheng, Q., Wang, Z.L., and Li, Z., “Nanogenerator-based Self-powered Sensors for Wearable and Implantable Electronics,” Research, Vol. 2020, 2020, pp. 1-25.
-
- 56. Rong, X., Zhao, J., Guo, H., Zhen, G., Yu, J., Zhang, C., and Dong, G., “Material Recognition Sensor Array by Electrostatic Induction and Triboelectric Effects,” Advanced Materials Technologies, Vol. 5, No. 9, 2020, pp. 2000641.
-
- 57. Li, Z.B., Li, H.Y., Fan, Y.J., Liu, L., Chen, Y.H., Zhang, C., and Zhu, G., “Small-sized, Lightweight, and Flexible Triboelectric Nanogenerator Enhanced by PTFE/PDMS Nanocomposite Electret,” ACS Applied Materials & Interfaces, Vol. 11, No. 22, 2019, pp. 20370-20377.
-
- 58. Tao, J., Bao, R., Wang, X., Peng, Y., Li, J., Fu, S., Pan, C., and Wang, Z.L., “Self‐powered Tactile Sensor Array Systems Based on the Triboelectric Effect,” Advanced Functional Materials, Vol. 29, No. 41, 2019, pp. 1806379.
-
- 59. Hua, Q., Sun, J., Liu, H., Bao, R., Yu, R., Zhai, J., Pan, C., and Wang, Z.L., “Skin-inspired Highly Stretchable and Conformable Matrix Networks for Multifunctional Sensing,” Nature Communications, Vol. 9, No. 1, 2018, pp. 1-11.
-
- 60. Kim, D.-H., Lu, N., Ma, R., Kim, Y.-S., Kim, R.-H., Wang, S., Wu, J., Won, S. M., Tao, H., Islam, A., Yu, K.J., Kim, T.-I., Chowdhury, R., Ying, M., Xu, L., Li, M., Chung, H.-J., Keum, H., McCormick, M., Liu, P., Zhang, Y.-W., Omenetto, F.G., Huang, Y., Cleman, T., and Rogers, J.A., “Epidermal Electronics,” Science, Vol. 333, No. 6044, 2011, pp. 838-843.
-
- 61. Peng, L., Zhang, Y., Wang, J., Wang, Q., Zheng, G., Li, Y., Chen, Z., Chen, Y., Jiang, L., and Wong, C.-P., “Slug-inspired Magnetic Soft Millirobot Fully Integrated with Triboelectric Nanogenerator for On-board Sensing and Self-powered Charging,” Nano Energy, Vol. 99, 2022, pp. 107367.
-
- 62. Sun, W., Li, B., Zhang, F., Fang, C., Lu, Y., Gao, X., Cao, C., Chen, G., Zhang, C., and Wang, Z.L., “TENG-Bot: Triboelectric Nanogenerator Powered Soft Robot Made of Uni-directional Dielectric Elastomer,” Nano Energy, Vol. 85, 2021, pp. 106012.
-
- 63. Xie, Y., Wang, S., Niu, S., Lin, L., Jing, Q., Yang, J., Wu, Z., and Wang, Z.L., “Grating‐structured Freestanding Triboelectric‐layer Nanogenerator for Harvesting Mechanical Energy at 85% Total Conversion Efficiency,” Advanced Materials, Vol. 26, No. 38, 2014, pp. 6599-6607.
-
- 64. Jin, T., Sun, Z., Li, L., Zhang, Q., Zhu, M., Zhang, Z., Yuan, G., Chen, T., Tian, Y., Hou, X., and Lee, C., “Triboelectric Nanogenerator Sensors for Soft Robotics Aiming at Digital Twin Applications,” Nature Communications, Vol. 11, No. 1, 2020, pp. 1-12.
-
- 65. Chen, J., Han, K., Luo, J., Xu, L., Tang, W., and Wang, Z.L., “Soft robots with Self-powered Configurational Sensing,” Nano Energy, Vol. 77, 2020, pp. 105171.
-
- 66. Chen, S., Pang, Y., Yuan, H., Tan, X., and Cao, C., “Smart Soft Actuators and Grippers Enabled by Self‐Powered Tribo‐Skins,” Advanced Materials Technologies, Vol. 5, No. 4, 2020, pp. 1901075.
-
- 67. Zheng, L., Dong, S., Nie, J., Li, S., Ren, Z., Ma, X., Chen, X., Li, H., and Wang, Z.L., “Dual-stimulus Smart Actuator and Robot Hand Based on a Vapor-responsive PDMS Film and Triboelectric Nanogenerator,” ACS Applied Materials & Interfaces, Vol. 11, No. 45, 2019, pp. 42504-42511.
-
- 68. Yang, H., Deng, M., Tang, Q., He, W., Hu, C., Xi, Y., Liu, R., and Wang, Z.L., “A Nonencapsulative Pendulum‐like Paper-based Hybrid Nanogenerator for Energy Harvesting,” Advanced Energy Materials, Vol. 9, No. 33, 2019, pp. 1901149.
-
- 69. Cheng, X., Tang, W., Song, Y., Chen, H., Zhang, H., and Wang, Z.L., “Power Management and Effective Energy Storage of Pulsed Output from Triboelectric Nanogenerator,” Nano Energy, Vol. 61, 2019, pp. 517-532.
-
- 70. Wang, Z.L., “On Maxwell's Displacement Current for Energy and Sensors: the Origin of Nanogenerators,” Materials Today, Vol. 20, No. 2, 2017, pp. 74-82.
-
- 71. Chen, X., Jiang, T., Yao, Y., Xu, L., Zhao, Z., and Wang, Z.L., “Stimulating Acrylic Elastomers by a Triboelectric Nanogenerator-toward Self‐powered Electronic Skin and Artificial Muscle,” Advanced Functional Materials, Vol. 26, No. 27, 2016, pp. 4906-4913.
-
- 72. Qu, X., Ma, X., Shi, B., Li, H., Zheng, L., Wang, C., Liu, Z., Fan, Y., Chen, X., Li, Z., and Wang, Z.L., “Refreshable Braille Display System Based on Triboelectric Nanogenerator and Dielectric Elastomer,” Advanced Functional Materials, Vol. 31, No. 5, 2021, pp. 2006612.
-
- 73. Shi, Y., Wang, F., Tian, J., Li, S., Fu, E., Nie, J., Lei, R., Ding, Y., Chen, X., and Wang, Z.L., “Self-powered Electro-tactile System for Virtual Tactile Experiences,” Science Advances, Vol. 7, No. 6, 2021, pp. abe2943.
-
- 74. Shlomy, I., Divald, S., Tadmor, K., Leichtmann-Bardoogo, Y., Arami, A., and Maoz, B.M., “Restoring Tactile Sensation Using a Triboelectric Nanogenerator,” ACS Nano, Vol. 15, No. 7, 2021, pp. 11087-11098.
-
- 75. Guo, X., Pei, W., Wang, Y., Chen, Y., Zhang, H., Wu, X., Yang, X., Chen, H., Liu, Y., and Liu, R., “A Human-machine Interface Based on Single Channel EOG and Patchable Sensor,” Biomedical Signal Processing and Control, Vol. 30, 2016, pp. 98-105.
-
- 76. Belkacem, A.N., Shin, D., Kambara, H., Yoshimura, N., and Koike, Y., “Online Classification Algorithm for Eye-movement-based Communication Systems Using two Temporal EEG Sensors,” Biomedical Signal Processing and Control, Vol. 16, 2015, pp. 40-47.
-
- 77. Vandhana, P., “A Novel Efficient Human Computer Interface Using an Electrooculogram,” International Journal of Research in Engineering and Technology, Vol. 3, No. 4, 2014, pp. 799-803.
-
- 78. Pu, X., Guo, H., Chen, J., Wang, X., Xi, Y., Hu, C., and Wang, Z.L., “Eye Motion Triggered Self-powered Mechnosensational Communication System Using Triboelectric Nanogenerator,” Science advances, Vol. 3, No. 7, 2017, pp. e1700694.
-
- 79. He, T., Sun, Z., Shi, Q., Zhu, M., Anaya, D.V., Xu, M., Chen, T., Yuce, M.R., Thean, A.V.-Y., and Lee, C., “Self-powered Glove-based Intuitive Interface for Diversified Control Applications in Real/Cyber Space,” Nano Energy, Vol. 58, 2019, pp. 641-651.
-
- 80. Kang, S., Cho, S., Shanker, R., Lee, H., Park, J., Um, D.-S., Lee, Y., and Ko, H., “Transparent and Conductive Nanomembranes with Orthogonal Silver Nanowire Arrays for Skin-attachable Loudspeakers and Microphones,” Science Advances, Vol. 4, No. 8, 2018, pp. aas8772.
-
- 81. Song, Y., Min, J., Yu, Y., Wang, H., Yang, Y., Zhang, H., and Gao, W., “Wireless Battery-free Wearable Sweat Sensor Powered by Human Motion,” Science Advances, Vol. 6, No. 40, 2020, pp. aay9842.
-
- 82. Shi, Q., and Lee, C., “Self‐powered Bio‐inspired Spider‐net‐coding Interface Using Single‐electrode Triboelectric Nanogenerator,” Advanced Science, Vol. 6, No. 15, 2019, pp. 1900617.
-
- 83. Shi, Q., Zhang, Z., Chen, T., and Lee, C., “Minimalist and Multi-functional Human Machine Interface (HMI) Using a Flexible Wearable Triboelectric Patch,” Nano Energy, Vol. 62, 2019, pp. 355-366.
-
- 84. Lee, J., Sul, H., Lee, W., Pyun, K. R., Ha, I., Kim, D., Park, H., Eom, H., Yoon, Y., Jung, J., Lee, D., and Ko, S.H., “Stretchable Skin‐like Cooling/heating Device for Reconstruction of Artificial Thermal Sensation in Virtual Reality,” Advanced Functional Materials, Vol. 30, No. 29, 2020, pp. 1909171.
-
 This Article
This Article
-
2022; 35(6): 378-393
Published on Dec 31, 2022
- 10.7234/composres.2022.35.6.378
- Received on Oct 31, 2022
- Revised on Nov 25, 2022
- Accepted on Nov 30, 2022
Services
Shared
Correspondence to
- Dukhyun Choi
-
School of Mechanical Engineering, Sungkyunkwan University
- E-mail: bred96@skku.edu
Gangnam Mirae Tower, Suite 601, 174 Saimdang-ro, Seocho-gu, Seoul 06627, South Korea
Tel: +82-2-598-1550 Fax: +82-2-598-1557 E-mail: composites@kscm.re.kr